COMPOSITION USUELLE DES APPAREILS NUMÉRIQUES
En général, un appareil à vision nocturne numérique est composé d’un objectif, d’un capteur sensible à la lumière, d’un bloc de contrôle, d’un bloc de traitement électronique de l’image, d’un écran et d’un oculaire.
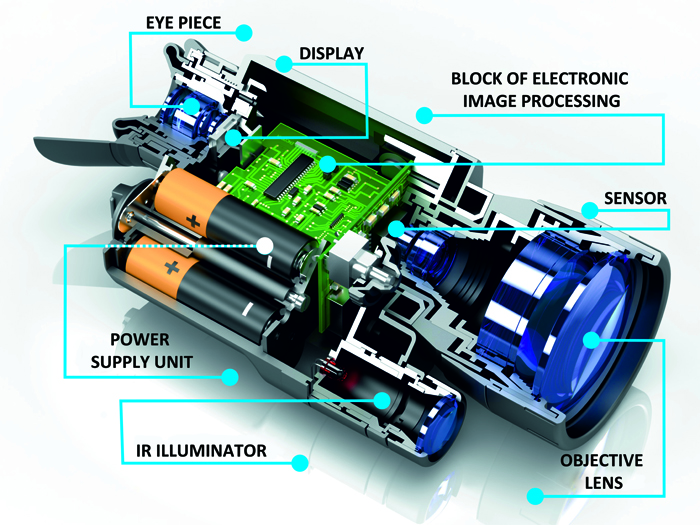
| Eye piece |
Oculaire |
| Display |
Écran |
| Block of electronic image processing |
Bloc de traitement électronique de l’image |
| Power supply unit |
Unité d’alimentation |
| Sensor |
Capteur |
| IR Illuminator |
Source lumineuse IR |
| Objective Lens |
Objectif |
L’alimentation des appareils à vision nocturne numérique est fournie par des éléments de puissance remplaçables : des piles rechargeables de taille identique ou une batterie rechargeable intégrée. Les appareils peuvent être équipés d’une prise pour recevoir de la puissance d’autres sources externes (par exemple du réseau électrique d’une voiture, d’une batterie externe compacte rechargeable).
Pour opérer dans des conditions de faible luminosité, les appareils à vision nocturne numérique sont souvent équipés d’une source lumineuse infrarouge intégrée, fonctionnant avec une diode laser ou LED. Pour plus de stabilité les appareils à vision nocturne numérique peuvent inclure un système de commande à distance avec des fonctions majeures – dans ce cas l’utilisateur peut contrôler l’appareil à l’aide d’une télécommande (RC, remote control).
Les appareils numériques peuvent être équipés de rails pour être montés sur une arme.
Comme dans tout appareil optique, l’objectif est là pour projeter des images à la surface du capteur, qui transforme à son tour la lumière réfléchie de l’objet en un signal électrique.
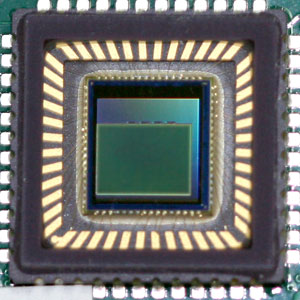
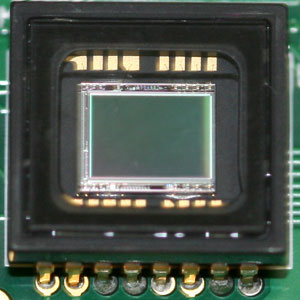
En tant qu’éléments photosensibles, les appareils à vision nocturne numérique utilisent des capteurs CCD ou CMOS.
 |
 |
|
CAPTEUR CMOS
|
CAPTEUR CCD |
Habituellement le bloc de traitement électronique est composé d’une ou plusieurs carte(s) (en fonction de la configuration de l’appareil), sur laquelle (lesquelles) sont placés des circuits imprimés spécifiques qui vont traiter le signal obtenu par le capteur, puis transmettre ce signal à l’écran pour afficher une image précise de l’objet observé. Les cartes comportent les commandes principales de l’appareil, et elles contiennent aussi les circuits d’alimentation pour toute l’unité et pour des éléments séparés du circuit.
En raison du fait que les appareils à vision nocturne numérique utilisent des micro-affichages (écrans) pour l’observation de l’image, il est nécessaire d’utiliser un oculaire fonctionnant comme une loupe et permettant à l’utilisateur de voir une image agrandie.
Les écrans le plus souvent employés sur les appareils à vision nocturne numérique sont des écrans LCD de type transmittif (l’écran est rétroéclairé) et des écrans OLED (un courant électrique est induit dans l’écran pour qu’il émette de la lumière).
L’application des écrans OLED offre une série d’avantages : la possibilité pour l’utilisateur d’utiliser l’appareil à de plus basses températures, une luminosité et un contraste des images plus élevés, et une conception plus simple et plus fiable (il n’y a pas de source rétroéclairée comme dans les LCD). Excepté les écrans LCD et OLED, les appareils numériques peuvent utiliser des micro-écrans fabriqués selon la technologie LCOS (Liquid Crystal on Silicone) – un type d’écran réflexif.
Par contraste avec les appareils à vision nocturne basés sur des tubes intensificateurs d’image (analogiques), les appareils à vision nocturne numérique intègrent une plus grande quantité de réglages et de fonctions utilisateur. Par exemple, le réglage de la luminosité, le contraste de l’image, la sélection de la couleur de l’image, les informations supplémentaires dans le champ de vision (l’heure actuelle, l’indication de la charge de la batterie, les icones des modes activés, etc.), un zoom numérique supplémentaire, la fonction “Picture in Picture” (qui affiche, dans une petite fenêtre séparée, tout ou une partie d’un objet dans une image supplémentaire agrandie) et une désactivation temporaire de l’affichage (dans un but d’économie d’énergie, mais aussi pour que l’observateur ne soit pas démasqué par l’écran illuminé).
Pour l’enregistrement d’images des objets observés, les appareils à vision nocturne numérique comprennent un enregistreur vidéo, ce qui permet de créer des photos et des vidéos.
Dans les appareils numériques il est facile d’implémenter des fonctions telles qu’une connexion sans fil (e.g. Wi-Fi), la transmission de données (photos et vidéos) à des périphériques externes; l’intégration d’un télémètre laser (les données du télémètre laser peuvent être affichées dans le champ de vision) et des capteurs GPS (possibilité d’établir les coordonnées de l’objet observé).
Un des avantages des appareils à vision nocturne numérique est la possibilité de fonctionner de jour sans craindre les éclats de lumière ou les sources de lumière intense, qui pourraient endommager les appareils à vision nocturne basé sur un tube intensificateur d’image.
Le réticule dans les lunettes de visée numérique est en général lui aussi numérique, ce qui veut dire que l’image du réticule durant le traitement du signal vidéo recouvre l’image sur l’écran puis est déplacée électroniquement, évitant le recours à des pièces mécaniques pour réaliser la correction balistique. Ces pièces mécaniques sont souvent utilisées dans des lunettes de visée à vision nocturne et diurne analogiques, et demandent une fabrication et un procédé d’assemblage de haute précision.
En outre, cela évite aux optiques classiques ou aux lunettes à vision numérique nocturne les effets courants tels que la parallaxe, du fait que l’image observée et l’image du réticule sont situées dans le même plan – le plan de l’écran.
Les lunettes de visée numériques peuvent stocker un grand nombre de réticules de configurations et de couleurs différentes dans leur mémoire, offrant la possibilité simple et rapide d’un “étalonnage en un seul tir” ou d’un “étalonnage freeze”, la fonction de correction balistique automatique du réticule pour des distances de tir variées, la sauvegarde des coordonnées d’étalonnage pour plusieurs armes, l’indication de l’inclinaison de l’arme sur le côté ou de son angle d’élévation, etc.
PARAMÈTRES PRINCIPAUX DES APPAREILS À VISION NOCTURNE NUMÉRIQUE
- Grossissement
- Résolution
- Sensibilité
- Angle du champ de vision
- Dégagement oculaire
- Puissance de la source lumineuse infrarouge
- Distance de détection et de reconnaissance
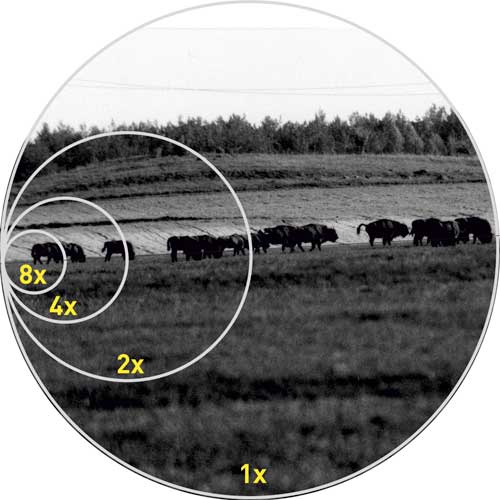
GROSSISSEMENT
Ce paramètre indique combien de fois l’image de l’objet observé à travers l’appareil est plus grande que la taille du même objet observé à l’œil nu.
Unité de mesure – fois (notation «×», e.g., «2×» - «deux fois»).
Pour les appareils à vision nocturne, y compris numériques, les valeurs type de grossissement sont comprises entre 1× et 5×, car la tâche principale de ces appareils est de détecter et de reconnaître des objets dans des conditions de faible luminosité. L’augmentation du grossissement dans les appareils à vision nocturne mène à une réduction significative de la capacité d’absorption totale – l’image sera bien plus sombre que sur un autre appareil similaire avec un grossissement moindre.
La baisse de l’absorbance à cause de l’augmentation du grossissement peut être compensé par l’augmentation du diamètre de l’objectif, mais cela conduira alors à une taille et à un poids plus élevés de l’appareil, réduisant l’avantage principal des appareils à vision nocturne portables (en particulier les lunettes de visée, puisque leurs utilisateurs doivent en plus tenir leur arme).
Le grossissement, défini par les distances focales de l’objectif et de la lentille, ainsi que par le coefficient de grossissement (К), est égal au quotient des grandeurs physiques (les diagonales) de l’écran par celles du capteur:
M= (fo/fe)*К= (fo/fe)*(Ld/Ls), where
fo – distance focale de l’objectif
fe – distance focale de la lentille
Ls – longueur de la diagonale du capteur
Ld – longueur de la diagonale de l’écran
Relation
Plus la focale de l’objectif et la taille de l’écran sont grandes, plus le grossissement est élevé.
Plus la focale de la lentille et la taille du capteur sont grandes, plus le grossissement est faible.
RÉSOLUTION
La résolution est la capacité de l’appareil à afficher séparément deux points ou lignes situés proches l’un(e) par rapport à l’autre. Dans les spécifications techniques ce paramètre peut être désigné par “résolution”, “résolution limite” ou “résolution maximale”. Ces termes ont en principe le même sens. La résolution est en général mesurée en lignes par millimètre (lpm) mais peut également être donnée en unités d’angle (secondes ou minutes).
Plus la valeur de la résolution en lignes par millimètres est grande et plus sa valeur en unités d’angle est basse, plus la résolution est grande. Plus la résolution est grande, plus l’image que l’observateur peut voir est nette.
Pour les appareils à vision nocturne il est conseillé d’avoir une résolution au minimum égale à 25 lpm – cette limite permet de distinguer le visage d’un homme de celui d’un animal ou d’un autre objet de taille similaire à une distance de 100 m.
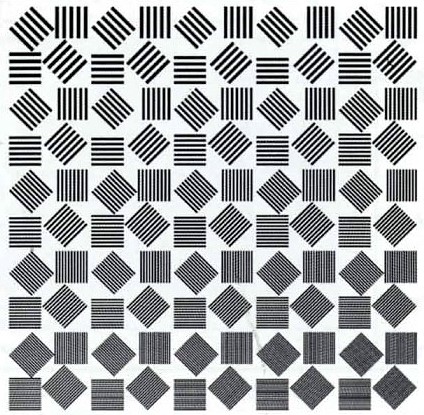
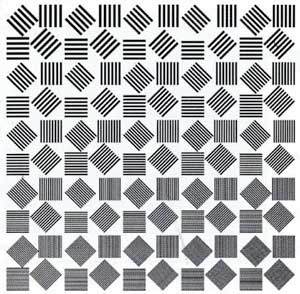
Pour mesurer la résolution d’un appareil à vision nocturne, on utilise un équipement spécial appelé collimateur. Un collimateur permet de créer une imitation de l’image d’un objet-test spécial – un graphique linéaire test illuminé situé à une certaine distance (généralement à 100 m).
 |
|
Graphique linéaire test
|
Après avoir observé l’image de l’objet-test, on peut tirer une conclusion sur la résolution de l’équipement de vision nocturne – plus les lignes du graphique clairement visibles sont proches l’une de l’autre, plus la résolution est élevée.
 |
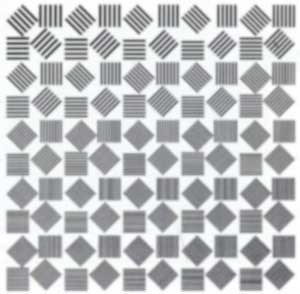 |
| Résolution normale |
Basse résolution |
La résolution est définie par les paramètres des éléments optiques de l’appareil, du capteur, de l’écran, de la qualité des circuits électroniques intégrés ainsi que par les algorithmes de traitement du signal.
La résolution globale de l’unité dépend des paramètres de l’objectif. À paramètres équivalents, plus le diamètre de l’objectif est grand, plus le grossissement et l’absorbance seront grands, et plus il y aura de détails dans l’image.
La résolution dépend de la résolution de l’objectif et de la lentille. L’objectif crée l’image d’un objet sur un plan du capteur, et si la résolution de l’objectif est insuffisante, il est impossible d’améliorer encore la résolution de l’appareil. De la même façon une lentille de piètre qualité peut altérer la plus nette des images créées sur l’écran par d’autres composants de l’appareil.
Les caractéristiques du capteur exercent une grande influence sur la résolution de l’unité. En premier lieu, la résolution du capteur – le nombre de pixels (généralement donné comme le produit du nombre de pixels dans une ligne par le nombre de pixels d’une colonne) et leur taille.
Relation:
Plus le nombre de pixels est grand et plus leur taille est basse, plus la résolution est élevée.
Cette affirmation est vraie pour des capteurs de taille physique identique. Un capteur d’une plus grande densité de pixels par unité de surface aura une plus grande résolution.
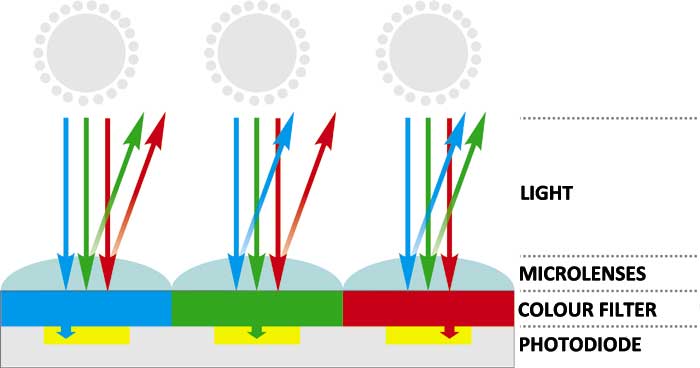
À la différence des capteurs noir et blanc, la résolution des capteurs couleur en général sera plus basse de 30-40%, ceci est dû à une structure de pixel différente – un pixel d’un capteur couleur consiste en la combinaison de trois sous-pixels, chacun d’entre eux enregistrant seulement la lumière d’une certaine partie du spectre de la lumière (respectivement - rouge, bleu, vert). Ceci est réalisé par l’utilisation de filtres de lumière colorés, qui ne laisse passer que la lumière d’une seule couleur. Ainsi lorsque la lumière monochromatique atteint le pixel d’une caméra couleur, le signal n’est enregistré que par un seul sous-pixel, alors que pour un capteur noir et blanc le signal sera enregistré par chaque pixel atteint par la lumière. C’est l’une des raisons pour lesquelles l’utilisation de capteurs couleur dans les appareils à vision nocturne est limitative et souvent pas très judicieuse.
| Light |
Lumière |
| Microlenses |
Micro-lentilles |
| Colour Filter |
Filtre couleur |
| Photodiode |
Photodiode |
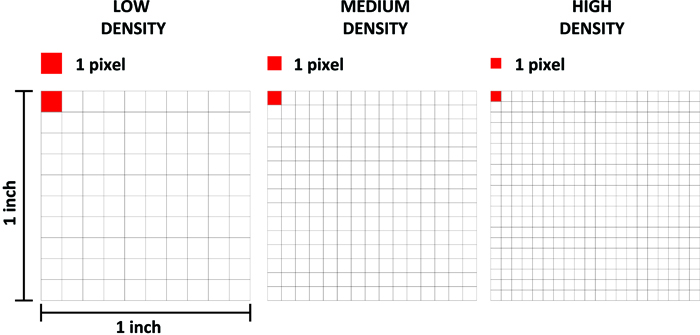
La résolution d’une unité dépend également des paramètres de l’écran qui affiche l’image. Comme pour le capteur, le rôle déterminant est joué ici par la résolution de l’écran (le nombre de pixels) et la taille des pixels. La densité de pixel de l’écran est donnée en PPI ("pixels par pouce") – cette caractéristique donne le nombre de pixels situé dans un carré d’un pouce de côté à l’écran.
| Low density |
Faible densité |
| Medium Density |
Densité moyenne |
| High Density |
Densité élevée |
| 1 pixel |
1 pixel |
| 1 inch |
1 pouce |
Dans le cas du transfert direct de l’image (sans changement d’échelle) du capteur à l’écran, la résolution sera la même des deux côtés. Dans ce cas la diminution de la résolution de l’appareil est éliminée (une baisse de la résolution survient lorsque la résolution de l’écran est plus basse que celle du capteur) et il n’y a pas besoin d’utiliser un écran coûteux (la résolution de l’appareil est plus grande que celle du capteur). Lorsqu’un capteur produit un signal au format TV analogique standard (e.g. PAL (625 lignes par image) ou NTSC (525 lignes par image)) l’utilisation d’un capteur de plus haute résolution que la résolution du signal TV n’est pas raisonnable.
Les appareils à vision nocturne numérique utilisent différents algorithmes pour un traitement du signal efficace, et cela peut influencer la résolution globale de l’appareil. Premièrement, on peut parler de “zoom numérique” lorsque l’image du capteur est traitée numériquement et transférée à l’écran avec un certain grossissement. Dans ce cas la résolution globale de l’appareil est diminuée. Un phénomène similaire peut être observé dans les caméras numériques lors du “zoom numérique”.
La résolution de l’appareil est encore influencée par le “Binning” (un algorithme qui augmente la sensibilité de l’appareil en rassemblant les signaux de plusieurs pixels proches, ce qui donne une baisse proportionnelle de la résolution).
Hormis les facteurs sus-cités, il est nécessaire de mentionner plusieurs autres facteurs qui peuvent faire diminuer la résolution de l’appareil. Il existe des bruits de différentes sortes qui distordent le signal utile et appauvrissent la qualité de l’image. On peut distinguer les types de bruit suivants :
Le bruit de photon. Le résultat de la nature discrète (au sens mathématique) de la lumière. Les photons de lumière frappent la surface photosensible du capteur de manière non simultanée et non uniforme dans l’espace.
Le courant d’obscurité (“bruit thermique”). Si l’objectif de l’appareil est obturé par un couvercle étanche, il est possible de voir des cadres “noirs” sur l’écran. La cause principale de ce bruit est l’émission thermo-ionique d’électrons (l’émission spontanée d’électrons en raison du capteur qui chauffe). Plus la température est basse, plus le signal de courant noir sera faible, et moins il y aura de bruit.
Bruit de transfert de charges. Durant le transfert de charge à l’intérieur du capteur une certaine partie des électrons qui constituent le signal utile est perdue. Ils sont captés par des défauts et des impuretés présents dans le cristal du capteur.
Bruit de lecture. Lorsque le signal accumulé dans une pixel est extrait du capteur, transformé en un courant et amplifié, chaque élément acquiert un bruit supplémentaire appelé bruit de lecture.
En vue de réduire le bruit, les appareils numériques utilisent différents logiciels algorithmiques de traitement de l’image, souvent appelés algorithmes de réduction du bruit.
À part le bruit, les interférences électriques provenant d’erreurs de configuration des pièces internes (la position du circuit électronique, la connexion des fils et câbles dans l’appareil) ou d’erreurs dans la disposition du circuit (la position des moyens de conduction, la présence et la qualité de couches de protection) peuvent significativement faire baisser la résolution. Les interférences peuvent être causées par des erreurs dans le circuit électrique de l’appareil : un mauvais choix des éléments pour la conception de différents filtres et pour l’alimentation des circuits électriques. C’est pourquoi la conception du circuit imprimé, le logiciel d’encodage de traitement du signal et les plans de création du circuit imprimé sont des challenges importants et difficiles lors de la conception des appareils à vision nocturne numérique.
La résolution de l’image des appareils à vision nocturne numérique dépend des conditions d’observation. Plus l’objet observé est éclairé, plus nous verrons une image nette dans l’appareil. On peut ainsi en conclure que la résolution maximale d’un appareil à vision nocturne numérique sera obtenue dans des conditions de luminosité assez proches de celle de la lumière du soleil ou avec l’aide d’une puissante source de lumière IR.
SENSIBILITÉ
Afin de caractériser la sensibilité de caméras numériques, on utilise souvent le paramètre du niveau d’éclairement minimum de l’objet observé pour lequel l’appareil est capable de produire une image.
Cette définition est la plus commode pour les appareils numériques opérant dans la partie visible du spectre électromagnétique. Pour les longueurs d’onde du domaine visible, une unité de mesure de la sensibilité est l’une des unités de lumière – le “lux”.
Puisque les appareils numériques sont sensés opérer de nuit, lorsque c’est le spectre infrarouge qui prévaut, il est plus correct d’utiliser des unités d’énergie qui décrivent le flux de lumière pour caractériser la sensibilité.
Ainsi le paramètre de la sensibilité d’un appareil à vision nocturne numérique peut être défini comme la valeur minimale d’énergie lumineuse infrarouge entrant dans l’appareil pour laquelle ce dernier est capable de produire une image d’une résolution qui permette la reconnaissance de l’objet observé (et conforme à une résolution de 25 lpm).
Hormis cela il existe également le paramètre de sensibilité spectrale – énergie minimale d’une longueur d’onde donnée du domaine infrarouge du spectre. Lorsque la sensibilité spectrale est indiquée, on donne également la longueur d’onde du rayonnement pour laquelle cette valeur a été atteinte.
Contrairement au rayonnement lumineux dans le domaine visible du spectre électromagnétique, il est impossible de mesurer en lux le rayonnement lumineux dans le domaine infrarouge. Dans ce cas il est plus correct d’utiliser une unité de mesure universelle – le watt.
La sensibilité d’un appareil dépend des paramètres suivants :
- Coefficient d’absorbance et la qualité de l’objectif
- Paramètres du capteur – taille physique, son type et sa sensibilité
- Paramètres de l’écran – contraste et luminosité, résolution
- Algorithmes pour le traitement du signal
- Qualité des circuits imprimés intégrés dans l’appareil
Pour obtenir une haute sensibilité dans un appareil à vision nocturne numérique il est nécessaire de collecter tous les photons entrant par l’objectif et de les transformer sans perte à la surface photosensible du capteur. L’objectif joue un rôle important dans le processus de transfert et ses paramètres tels que le coefficient d’absorbance, le nombre de lentilles dans le plan optique, la qualité de la couche anti-reflet à leur surface et le noircissement sur leurs bords (afin d’éviter la dispersion de la lumière à l’intérieur de l’objectif).
Relations:
Plus le coefficient d’absorbance de l’objectif est grand (élevé lorsque la pupille/lentille d’entrée est grande et la distance focale faible), plus la sensibilité globale de l’appareil est grande.
Plus le nombre de lentilles utilisées dans l’objectif est grand, plus le coefficient d’absorbance et la sensibilité globale de l’appareil sont faibles.
Plus le coefficient de transmission optique des lentilles de l’objectif est élevé, plus la sensibilité est grande.
Le capteur est le récepteur principal et le convertisseur de la lumière en un signal électrique. C’est en grande partie le capteur qui définit la sensibilité d’un appareil. La sensibilité du capteur dépend de la taille des pixels et de leur densité sur le capteur. Toutes choses étant égales par ailleurs, plus la taille du capteur est grande, plus la sensibilité du capteur est grande. Moins il y a de corrélation entre la surface totale du capteur et la surface totale de tous les pixels, plus la sensibilité globale du capteur est élevée.
Récemment de nombreux fabricants d’appareils à vision nocturne à bas coût se sont mis à intégrer des capteurs de qualité moindre pour appareils photo (souvent des capteurs couleur). Ces capteurs ont une bonne sensibilité dans le domaine visible (en journée) du spectre électromagnétique, mais une très basse sensibilité dans le domaine infrarouge. Les spécifications techniques de tels appareils manquent d’informations à propos de la sensibilité mais affichent fièrement un nombre élevé de mégapixels. Il est facile de conclure qu’en dépit d’une haute résolution du capteur, de tels appareils ne sont pas capables de produire des images de qualité la nuit sans une puissante source de lumière, leur capteur ayant une trop basse sensibilité dans le domaine infrarouge du spectre.
La seconde erreur commune survient lorsque la sensibilité d’un appareil à vision nocturne numérique est donnée dans une unité photométrique (lux). Ici les valeurs de la sensibilité peuvent atteindre un dix millième de lux, ce qui est considérablement plus élevé que ce que peuvent fournir des appareils à vision nocturne analogique basés sur des tubes intensificateurs d’image de génération 2+ ou supérieure. Une telle sensibilité surnaturelle peut s’expliquer de manière simple. En général, on utilise un luxmètre pour mesurer la sensibilité, et ses caractéristiques spectrales coïncident avec les caractéristiques spectrales de l’œil humain (voir le diagramme). Tout comme l’œil humain, le luxmètre perçoit (mesure) le rayonnement seulement dans le domaine visible du spectre lumineux, soit entre 380 et 780 nm. Ce qui veut dire que lors d’une mesure de l’éclairement à l’aide d’un luxmètre dans la nuit, les valeurs du rayonnement obtenues seront proches de zéro puisque le domaine visible de la lumière est pratiquement absent la nuit. Mais d’un autre côté, une puissante source lumineuse est présente (voir le diagramme de l’éclairage naturel du ciel la nuit), et le luxmètre est incapable de l’enregistrer, alors que les appareils à vision nocturnes perçoivent aisément cet éclairage. À titre d’exemple, le diagramme présente les courbes de la sensibilité spectrale des capteurs CCD SONY et des tubes intensificateurs d’image de génération 2+.
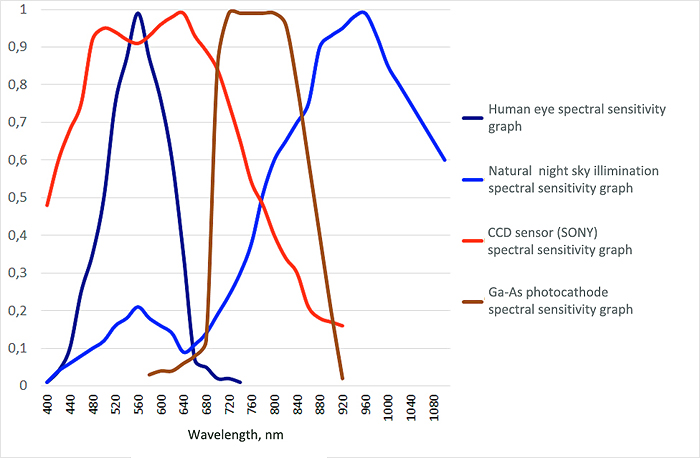
| Human eye spectral sensitivity graph |
Courbe de sensibilité spectrale de l’œil humain
|
| Natural night sky illumination spectral sensitivity graph |
Courbe de sensibilité spectrale de l’éclairement naturel du ciel la nuit |
| CCD sensor (SONY) spectral sensitivity graph |
Courbe de sensibilité spectrale du capteur CCD SONY |
| Ga-As photocathode spectral sensitivity graph |
Courbe de sensibilité spectrale d’une photocathode Ga-As |
| Wavelength, nm |
Longueur d’onde, nm |
La sensibilité spectrale caractérise la capacité d’un appareil à vision nocturne à opérer correctement de nuit. Généralement, elle est indiquée pour une ou plusieurs longueurs d’onde du spectre. Pour comprendre la “qualité” d’un appareil à vision nocturne numérique, le moyen le plus efficace est de connaître la sensibilité spectrale pour les longueurs d’onde autour des 780 … 810 nm (valeurs moyennes du rayonnement infrarouge d’une étoile stellaire; dans cet intervalle les capteurs ont une sensibilité moyenne) et autour des 910 … 940 nm (valeurs hautes du rayonnement infrarouge d’une étoile stellaire; plage invisible de l’infrarouge, les capteurs sont y sont encore sensibles).
Il est possible de comparer les valeurs de la sensibilité spectrale de plusieurs appareils pour tirer des conclusions sur leur capacité à “voir” dans la nuit. Il faut cependant rappeler que la sensibilité d’un appareil numérique n’est pas seulement définie par la sensibilité de son capteur, mais également par les paramètres et caractéristiques de l’appareil tels que la résolution de l’objectif et de la lentille, la résolution de l’écran, le coefficient d’absorbance de l’objectif, la qualité du capteur (l’absence de bruit), la qualité des circuits électroniques (l’absence d’interférences) et les algorithmes utilisés pour le traitement du signal.
Aujourd’hui les appareils à vision nocturne numérique emploient deux types principaux de capteurs – CCD et CMOS. La différence majeure entre ces deux types réside dans l’organisation électronique du signal lu sur les pixels. Dans les capteurs CCD (Charge Coupled Device), les signaux de chaque pixel sont transférés séquentiellement à l’électronique du capteur puis l’amplification du signal d’ensemble a lieu. Dans les capteurs CMOS (Complementary Metal-Oxide Semiconductor), les signaux de tous les pixels sont lus simultanément et amplifiés pour chaque pixel par un amplificateur individuel. Pour cette raison, (le besoin qu’une partie du capteur soit utilisée par un grand nombre d’amplificateurs individuels) la densité de pixels dans les capteurs CMOS est plus faible que dans les capteurs CCD, et ceci vaut également pour la sensibilité. Ces dernières années, de nouvelles technologies ont fait leur apparition pour la fabrication de capteurs CMOS (tels le SONY EXMOR, BSI (Toshiba, Omnivision)). Elles visent à augmenter la densité de pixels à la surface du capteur, ce qui permet d’augmenter la sensibilité globale du capteur. Les paramètres de ces capteurs approchent des valeurs des capteurs CCD et les meilleurs modèles les dépassent même sur certains paramètres.
L’écran d’une unité de vision nocturne influence également la sensibilité globale de l’appareil, plus encore que les valeurs de la résolution, du contraste et de la luminosité.
Il est possible de tirer certaines conclusions sur le fonctionnement des appareils à vision nocturne numérique comparé à celui des tubes intensificateurs d’image de génération 2+ ou 3. Sur le diagramme de la sensibilité il est clairement visible que les capteurs CCD et la photocathode des tubes intensificateurs d’image de générations 2+/3 ont une sensibilité meilleure dans l’intervalle 750-850 nm de l’infrarouge et moins bonne pour les longueurs d’onde au-delà de 900 nm.
En comparant ces données avec le graphique de la répartition du spectre de l’éclairage naturel, on peut conclure qu’en mode passif (sans lumière infrarouge auxiliaire), ce sont les appareils à vision nocturne basés sur des tubes intensificateurs d’image de générations 2+/3 qui auront l’avantage (une sensibilité plus élevée).
Il est important de voir ici que bien que les appareils à vision nocturne numérique aient une certaine sensibilité pour les longueurs d’onde au-delà de 900 nm (lorsque la longueur d’onde augmente, la sensibilité décroît progressivement), celle des appareils à vision nocturne basés sur des tubes intensificateurs d’image de génération 2+/3 décroît rapidement vers zéro. Pour cette raison, les appareils à vision nocturne basés sur des tubes intensificateurs d’image sont inefficaces lorsqu’ils sont utilisés avec des sources de lumière infrarouge “invisible” (e.g. 915 nm ou 940 nm), alors que les appareils à vision nocturne numérique sont hautement compatibles avec elles. Dû au fait que les appareils à vision nocturne analogique (en particulier de génération 2+) requièrent souvent un éclairage additionnel pour une utilisation hors de la ville (par exemple pour la chasse), le facteur de compatibilité avec les sources de lumière infrarouge invisible devient un avantage conséquent pour les appareils à vision nocturne numérique.
Dans notre sujet, la sensibilité est une valeur minimale de l’énergie de radiation infrarouge. C’est pourquoi plus sa valeur en watts est basse, meilleure est sa sensibilité.
À des fins de comparaison nous devons observer les valeurs de sensibilité mesurées pour des appareils à vision nocturne numérique Yukon et Pulsar (voir le tableau) à la longueur d’onde 780 nm. Le Digisight N750 à la longueur d’onde 780 nm sera bien plus sensible que le NVMT Spartan 3x42, mais moins sensible que le Phantom 3x50 de génération 2+. À la longueur d’onde 915 nm, le Digisight N750 aura l’avantage sur le Phantom 3x50 de génération 2+.
| Appareil à vision nocturne |
Génération |
Sensibilité spectrale à 780 nm, mW |
Sensibilité spectrale à 915 nm, mW |
| Digisight N750 |
Digital |
≈2,5·10 -5 |
≈1,2·10 -4 |
| Phantom 3x50 |
II+ |
≈1,5·10 -5 |
≈5·10 -4 |
| Spartan 3x42 |
I |
≈25·10 -5 |
≈8000·10 -4 |
| Spartan 4x50 |
I |
≈15·10 -5 |
≈2500·10-4 |
CHAMP DE VISION
Ce paramètre indique la proportion de l’espace qui peut être observée simultanément à travers l’appareil. En général dans les spécifications techniques le champ de vision est donné en degrés (l’angle de champ de vision est indiqué dans la formule ci-dessous par 2Ѡ) ou en mètres pour la distance (L) à l’objet observé (le champ de vision linéaire est indiqué dans la formule ci-dessous par А).
Le champ de vision des appareils à vision nocturne numérique est défini par la distance focale de l’objectif (f0) et par la taille physique du capteur (В). En général la largeur du capteur (côté horizontal) est choisie pour les calculs, et le résultat donne un angle de champ de vision horizontal : 2Ѡ=2*arctg(B/(2* fo))

Connaissant le côté vertical du capteur (hauteur) et sa diagonale, il est possible de calculer les champs de vision angulaire et diagonal.
Relation:
Plus le côté du capteur est grand ou plus la focale de l’objectif est faible, plus l’angle de champ de vision sera grand.
Plus le champ de vision de l’appareil est grand, plus l’observation d’objets est confortable – il n’y a pas besoin de constamment bouger l’appareil pour observer la zone désirée.
Il est important de comprendre que le champ de vision est inversement proportionnel au grossissement – l’augmentation du grossissement de l’appareil implique un rétrécissement du champ de vision.
En même temps que le champ de vision augmente, les distances de détection et de reconnaissance diminueront car premièrement le grossissement augmentera, secondement si une source de lumière infrarouge est utilisée pour plus de confort dans l’observation, il faudra l’utiliser avec une large divergence angulaire du rayon (cela doit approximativement correspondre à l’angle de champ de vision). Ceci impliquera alors une baisse de la luminosité concernant la surface et une diminution de la distance de la source de lumière infrarouge.
DÉGAGEMENT OCULAIRE
Le dégagement oculaire est la distance qui sépare la surface externe de la pupille de sortie du plan dans lequel l’œil de l’observateur est situé lorsque l’image observée est optimale (champ de vision le plus large possible, déformations minimales). Ce paramètre est très important dans les optiques d’armement, pour lesquelles le dégagement oculaire doit être d’au moins 50 mm (optimal 80-100 mm). De telles valeurs de dégagement oculaire sont nécessaires pour éviter à l’observateur de se blesser à cause du recul lors du tir. Dans les appareils à vision nocturne le dégagement oculaire est en général égal à la longueur de l’œillère, nécessaire pour protéger le tube intensificateur d’image ou l’écran de la lumière du jour.
DISTANCES DE DÉTECTION ET DE RECONAISSANCE
Distance de détection – la distance maximale de l’appareil d’observation à un objet pouvant être détecté à l’aide de l’appareil.
Distance de reconnaissance – la distance maximale à laquelle l’observateur peut reconnaître le type d’objet observé (humain, animal, bâtiment, etc.).
Ces valeurs ne sont pas constantes pour un appareil en particulier et dépendent des paramètres suivants :
- Grossissement
- Résolution
- Sensibilité de l’appareil
- Conditions d’observation
- Caractéristiques de l’objet observé
- Niveau de contraste entre l’objet et l’arrière-plan
- Utilisation d’une source de lumière infrarouge
Les appareils ayant un grossissement plus élevé (toutes choses égales par ailleurs) permettent d’amener les objets observés à une distance plus proche et les distances de détection et de reconnaissance seront plus élevées.
La résolution de l’appareil influence en grande partie la distance de reconnaissance – une haute résolution permet à l’observateur de reconnaître avec plus de certitude le type d’objet observé grâce à une vue plus nette des détails de l’objet.
La sensibilité des appareils à vision nocturne numérique influence les distances de détection et de reconnaissance de la même façon. Les appareils dotés d’une meilleure sensibilité assurent des images plus nettes et plus contrastées de l’objet observé à de plus grandes distances que des appareils de sensibilité plus basse.
Hormis les paramètres de l’appareil, les distances de détection et de reconnaissance sont considérablement influencées par les conditions d’observation et les caractéristiques de l’objet observé. Les conditions d’observation sont définies par le niveau d’éclairage naturel du ciel nocturne et par la transparence de l’atmosphère. Si les niveaux d’éclairage et de transparence de l’atmosphère diminuent (fumée, brouillard, poussières, particules, etc.) les distances de détection et de reconnaissance diminueront à leur tour.
Les propriétés de réflexion de l’objet influenceront les distances de détection et de reconnaissance de la même façon; elles sont définies par la couleur et la texture (brillant ou mat) de la surface de l’objet et également par le niveau de contraste de l’objet par rapport à l’arrière-plan. Par exemple, il est plus facile de détecter et reconnaître un animal au milieu d’un champ enneigé qu’au bord d’une forêt, d’une prairie verte ou d’un champ.
Dans des conditions de faible luminosité les distances de détection et de reconnaissance peuvent être augmentées à l’aide d’une source de lumière infrarouge. Hormis l’augmentation de l’éclairage global de l’objet, dans certains cas le rayonnement de la source de lumière infrarouge se reflète parfaitement dans les yeux de l’animal, ce qui permet une détection de l’animal à des distances assez longues – durant l’observation à travers l’appareil de vision nocturne ses yeux apparaîtront comme des taches brillantes.
SOURCES DE LUMIÈRE IR
Il est utile de mentionner l’utilisation de sources de lumière IR en complément des appareils à vision nocturne numérique. En général les appareils à vision nocturne comportent une source de lumière IR. D’un autre côté il y a sur le marché un grand nombre de sources de lumière IR vendus en tant qu’accessoires et destinés à accompagner les appareils à vision nocturne.
Basé sur le type de source émettrice, les sources de lumière IR peuvent être divisées en deux groupes principaux – les sources de lumière à LED et les laser.
Dans les sources de lumière à LED c’est une diode qui est utilisée; elle émet un rayonnement à une certaine longueur d’onde du domaine de l’infrarouge. Sur le marché on peut trouver des sources de lumière à LED de différentes longueurs d’onde (le plus souvent 805 nm, 850 nm et 940 nm) et de différente puissance.
Les lasers sont fabriqués sur la base des diodes laser à semi-conducteurs. Les lasers ont des avantages considérables sur les sources de lumière à LED.
Tout d’abord, leur rayonnement est cohérent, c’est à dire que tous les photons de la lumière d’un rayon ont la même énergie, la même direction et la même longueur d’onde. Grâce à cela un faisceau de lumière a une haute densité d’énergie dans un intervalle étroit du spectre électromagnétique, qui est préservée même à de longues distances. Les LED ont un rayonnement épars, ce qui se caractérise par un large intervalle du spectre et de grandes pertes d’énergie à distance de la source du rayonnement. Ceci veut dire qu’à puissance égale, la source de lumière laser est capable d’illuminer l’objet observé à de plus grandes distances que la source de lumière LED; en d’autres termes, la “distance de fonctionnement” du laser est plus grande que celle de la LED.
Secondement, la consommation d’énergie dans les sources de lumière lasers est significativement plus faible que dans les sources de lumière LED de même puissance.
Les principaux paramètres des sources de lumière sont la puissance du rayonnement et la divergence angulaire du faisceau.
La puissance du rayonnement est le principal facteur pour la distance d’une source de lumière IR. Elle dépend du type de source, du procédé optique et de la qualité des lentilles et du traitement anti-reflet. Pour la majorité des sources de lumière LED, le rayonnement maximal va de 30 à 100 mW (valeurs de puissance basses pour les sources IR intégrées, valeurs plus élevées pour les sources IR séparées produites en tant qu’accessoires).
Dans les sources de lumière laser la puissance maximale peut fluctuer entre10 et 50 mW pour approximativement la même consommation d’énergie que dans les sources de lumière à LED.
Si plusieurs sources de lumière sont utilisées simultanément (e.g. une source de lumière intégrée et une détachable externe) les illuminations s’additionneront, mais seulement dans les cas où l’objet observé se trouve à une distance n’excédant pas la distance maximale de fonctionnement de chacune des deux sources de lumière (ce qui signifie que chacune des deux sources est capable d’illuminer l’objet observé à cette distance). Si la distance à l’objet excède la distance maximale de fonctionnement de l’une des deux sources de lumière, alors l’objet observé sera illuminé par une seule des deux sources lumineuses, ce qui est plus puissant. Cela veut dire qu’à cette distance les illuminations ne s’additionneront pas.
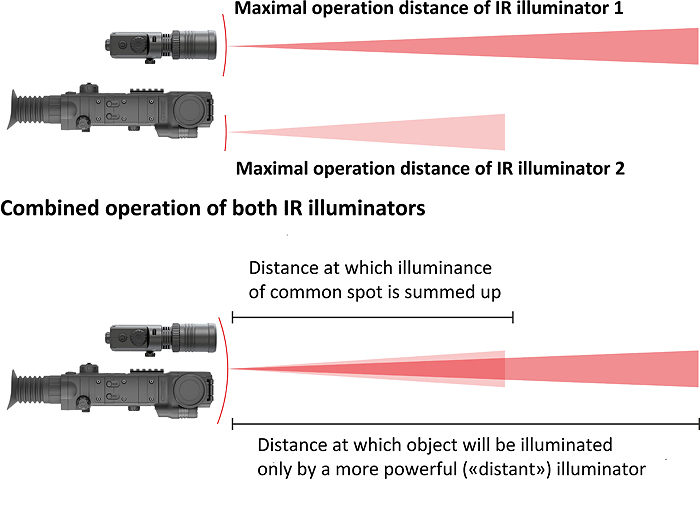
| Maximal operational distance of IR illuminator |
Distance de fonctionnement maximale de la source de lumière IR |
| Combined operation of both IR illuminators |
Fonctionnement combiné des deux sources de lumière IR |
| Distance at which illuminance of common spot is summed up |
Distance à laquelle les illuminations s’additionnent dans un faisceau commun |
| Distance at which object will be illuminated only by a more powerful (“distant”) illuminator |
Distance à laquelle l’objet n’est plus illuminé que par la source de lumière la plus puissante |
À la décharge des sources de lumières laser, on peut leur attribuer un certain danger pour l’œil humain lors de l’observation directe dans les cas où le rayonnement appartient à une classe de sécurité au-dessus de la 1ère classe. Pour cette raison, seulement les lasers de 1ère classe sont autorisés sur le marché civil. Ceci aide à prévenir une trop large diffusion des sources de lumière laser.
Les sources laser de la justement désignée 1ère classe surpassent les sources de lumière à LED ordinaires en efficacité de fonctionnement car elles sont, pour des distances de fonctionnement relativement égales, de plus petite taille et consomment moins d’énergie.
La divergence angulaire du faisceau d’une source de lumière IR doit être proche de l’angle de champ de vision de l’appareil à vision nocturne pour illuminer la zone complète à voir à travers l’appareil. Plus la divergence angulaire est grande, plus l’illumination de la zone sera faible et En pratique les sources de lumière IR ont une diffusion irrégulière de l’énergie (illumination) sur une zone. En général, le centre de la zone reçoit plus d’énergie que ses bords. En fait, cela signifie que si la divergence angulaire augmente, l’observateur remarquera aisément la diminution de l’illumination sur les bords de la zone, alors que le centre de la zone sera éclairé plus intensément.
Lors du choix d’une source de lumière IR pour un appareil à vision nocturne, il faut prendre en compte l’intervalle du spectre électromagnétique dans lequel l’appareil à vision nocturne fonctionne. L’efficacité maximale (la distance d’illumination) sera obtenue pour la source de lumière ayant la longueur d’onde pour laquelle l’appareil à vision nocturne a la sensibilité la plus élevée. Par exemple, si c’est une source de lumière IR de longueur d’onde 808 nm qui est utilisée, les appareils à vision nocturne auront avec elle une meilleure vision qu’avec une source de lumière de 940 nm, ce qui veut dire que la sensibilité du capteur est plus élevée à 808 nm.
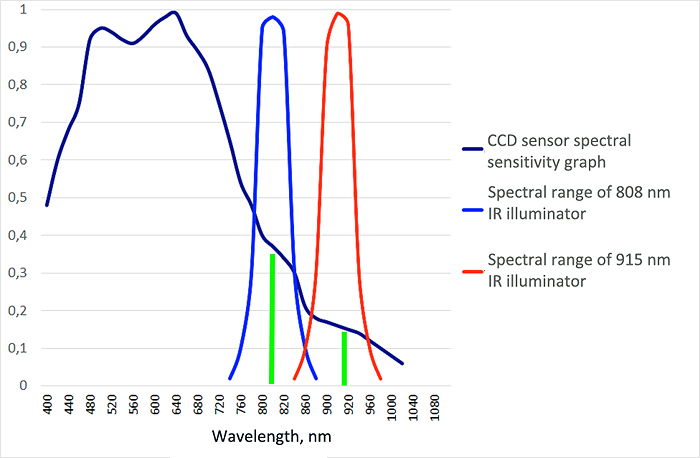
| CCD sensor spectral sensitivity graph |
Courbe de sensibilité spectrale du capteur CCD |
| Spectral range of 808 nm IR illuminator |
Plage spectrale d’une source de lumière IR de 808 nm |
Il est utile de mentionner un énième avantage de la combinaison d’un appareil à vision nocturne numérique associé à une source de lumière IR. Évidemment, comparés aux tubes intensificateurs d’image, les capteurs d’appareils numériques ont une sensibilité globale moindre, mais une sensibilité spectrale considérablement plus élevée dans la plage des 900 nm et au-delà. Le rayonnement dans cette plage est invisible aux yeux des humains et des animaux. Tout ceci contribue au succès des sources de lumière IR invisible en tant que complément des appareils à vision nocturne numérique pour une illumination additionnelle de l’objet observé.
Et d’un autre côté, ces sources de lumière IR invisible seront pratiquement inutiles en combinaison avec des appareils à vision nocturne analogique. Ceci est particulièrement vrai pour les appareils à vision nocturne numérique utilisés pour la chasse : les chasseurs peuvent se servir en “toute confiance” de sources de lumière “invisible” pour une illumination additionnelle – l’animal ne la verra pas et ne prendra pas peur.
L’influence de la puissance des sources de lumière IR et de leur type sur la distance de reconnaissance en fonction de la sensibilité de l’appareil sont présentées dans le tableau 1 (pour les sources laser) et et le tableau 2 (pour les sources de lumière à LED).
Les données sont présentées pour les conditions suivantes : nuit de pleine lune, ciel nuageux, atmosphère transparente (ni brouillard, ni brume). Une silhouette d’humain de la taille d’un homme, habillée d’une tenue camouflage et située à l’arrière-plan au bord d’une forêt a été utilisé comme objet d’observation. La divergence angulaire du faisceau des sources de lumière IR est de 5-7 degrés.
Tableau 1
|
Sensibilité à la longueur d’onde 780 nm, mW
|
Laser 780 nm
|
Sensibilité à la longueur d’onde 915 nm, mW
|
Laser 915 nm
|
|
Distance de reconnaissance, m
|
Distance de reconnaissance, m
|
|
10 mW
|
20 mW
|
50 mW
|
10 mW
|
20 mW
|
50 mW
|
|
400·10-5 - 500·10-5
|
40-50
|
60-75
|
90-110
|
100·10-4 - 150·10-4
|
30-40
|
50-60
|
70-80
|
|
150·10-5 - 200·10-5
|
60-80
|
80-100
|
120-140
|
35·10-4 - 50·10-4
|
50-70
|
70-90
|
100-120
|
|
25·10-5 - 70·10-5
|
100-120
|
125-160
|
170-220
|
15·10-4 - 30·10-4
|
80-90
|
90-110
|
140-160
|
|
15·10-5 - 20·10-5
|
130-150
|
170-190
|
230-270
|
6·10-4 - 10·10-4
|
100-120
|
130-150
|
180-200
|
|
6·10-5 - 10·10-5
|
160-180
|
210-230
|
280-320
|
4·10-4 - 5·10-4
|
130-160
|
160-180
|
210-230
|
|
1·10-5 - 5·10-5
|
200-260
|
280-320
|
380-440
|
1·10-4 - 3·10-4
|
170-220
|
190-240
|
250-300
|
Tableau 2
|
Sensibilité à la longueur d’onde 780 nm, mW
|
LED 805 nm
|
LED 850 nm
|
Sensibilité à la longueur d’onde 915 nm, mW
|
LED 940 nm
|
|
Distance de reconnaissance, m
|
Distance de reconnaissance, m
|
Distance de reconnaissance, m
|
|
20 mW
|
50 mW
|
100 mW
|
20 mW
|
50 mW
|
100 mW
|
20 mW
|
50 mW
|
100 mW
|
|
400·10-5 - 500·10-5
|
35-45
|
60-80
|
120-140
|
20-30
|
50-70
|
80-110
|
100·10-4 - 150·10-4
|
20-25
|
40-60
|
70-90
|
|
150·10-5 - 200·10-5
|
50-60
|
90-110
|
150-180
|
40-50
|
80-90
|
130-150
|
35·10-4 - 50·10-4
|
30-40
|
60-80
|
110-140
|
|
25·10-5 - 70·10-5
|
70-80
|
120-140
|
210-250
|
60-70
|
110-120
|
170-200
|
15·10-4 - 30·10-4
|
50-60
|
90-100
|
150-170
|
|
15·10-5 - 20·10-5
|
85-90
|
150-160
|
270-300
|
80-90
|
130-140
|
210-220
|
6·10-4 - 10·10-4
|
65-70
|
120-130
|
190-210
|
|
6·10-5 - 10·10-5
|
100-110
|
170-190
|
310-340
|
100-110
|
160-180
|
240-280
|
4·10-4 - 5·10-4
|
80-90
|
140-160
|
220-250
|
|
1·10-5 - 5·10-5
|
120-150
|
210-260
|
350-380
|
120-160
|
190-240
|
300-350
|
1·10-4 - 3·10-4
|
100-130
|
170-200
|
|
 Thermion 2 LRF XL50
Thermique Riflescope
Thermion 2 LRF XL50
Thermique Riflescope
 Thermion 2 LRF
Thermique Riflescope
Thermion 2 LRF
Thermique Riflescope
 Talion
Thermique Riflescope
Talion
Thermique Riflescope
 Thermion 2
Lunette d’imagerie thermique
Thermion 2
Lunette d’imagerie thermique
 Merger LRF XL50
Jumelles d'imagerie thermique
Merger LRF XL50
Jumelles d'imagerie thermique
 Merger LRF XP50
Jumelles d'imagerie thermique
Nouveau
Merger LRF XP50
Jumelles d'imagerie thermique
Nouveau Merger LRF XP35
Jumelles d'imagerie thermique
Merger LRF XP35
Jumelles d'imagerie thermique
 Merger LRF XQ35
Jumelles d'imagerie thermique
Nouveau
Merger LRF XQ35
Jumelles d'imagerie thermique
Nouveau Telos
Lunettes à l'imagerie thermique
Telos
Lunettes à l'imagerie thermique
 Axion 2 LRF
Lunettes à l'imagerie thermique
Axion 2 LRF
Lunettes à l'imagerie thermique
 Axion 2
Lunettes à l'imagerie thermique
Nouveau
Axion 2
Lunettes à l'imagerie thermique
Nouveau Axion XQ30 PRO
Lunettes à l'imagerie thermique
Axion XQ30 PRO
Lunettes à l'imagerie thermique
 Krypton 2
Lunettes à l'imagerie thermique
Krypton 2
Lunettes à l'imagerie thermique
 Axion XM30F
Lunettes à l'imagerie thermique
Axion XM30F
Lunettes à l'imagerie thermique
 Alimentations APS
Alimentations
Alimentations APS
Alimentations
 Chargeur de batterie APS
Chargeur de batterie
Chargeur de batterie APS
Chargeur de batterie
 Alimentations IPS
Alimentations
Alimentations IPS
Alimentations
 Chargeur de batterie IPS
Chargeur de batterie
Nouveau
Chargeur de batterie IPS
Chargeur de batterie
Nouveau PSP-V Weaver Rail Adapter
Adapter
Nouveau
PSP-V Weaver Rail Adapter
Adapter
Nouveau Adaptateurs PSP-B
Adaptateurs
Adaptateurs PSP-B
Adaptateurs
 Adaptateurs FN Cover Ring
Adaptateurs Cover Ring
Adaptateurs FN Cover Ring
Adaptateurs Cover Ring
 Télécommande sans fil
pour appareils numériques et imageurs thermiques
Télécommande sans fil
pour appareils numériques et imageurs thermiques
 C-CLAMP
Accessoires Pulsar
C-CLAMP
Accessoires Pulsar
 TREE MOUNT
Accessoires Pulsar
TREE MOUNT
Accessoires Pulsar
 SUPPORT POUR CADRE DE FENÊTRE
Accessoires Pulsar
SUPPORT POUR CADRE DE FENÊTRE
Accessoires Pulsar
 Support de téléphone HELION FLIP-UP
Accessoires Pulsar
Support de téléphone HELION FLIP-UP
Accessoires Pulsar
 Support flat glass
Accessoires Pulsar
Support flat glass
Accessoires Pulsar
 Draggone
Accessoires Pulsar
Nouveau
Draggone
Accessoires Pulsar
Nouveau Monoculaire Pulsar 3x20 B
Accessoires
Monoculaire Pulsar 3x20 B
Accessoires
 Cibles Thermiques pour Etalonnage
Accessoires
Cibles Thermiques pour Etalonnage
Accessoires
 Telos LRF Tripod Adapter
Accessoires Pulsar
Telos LRF Tripod Adapter
Accessoires Pulsar












 English
English German
German French
French Spanish
Spanish Italiano
Italiano English
English Lietuvių
Lietuvių


