In engineering, there are notions of object and background. Objects are ordinary things that have to be detected and examined (humans, vehicles, animals etc.), the background is everything else not covered by the object in the field of view (forest, grass, buildings etc.)
The operation of all thermal imaging systems is based on the perception of the temperature differences between two things i.e. an object against a background and on the conversion of that difference to a visible image. Because all bodies are not heated up equally a picture of IR distribution appears. The higher the difference between an objects IR radiation intensity and the background’s IR radiation intensity the more resolvable and with better contrast the thermal image will be. Contemporary thermal imaging devices are capable of detecting temperature differences of 0.015-0.07°C.
Most of the night vision units based on either image intensifier tubes or CMOS/CCD sensors detect IR radiation in the wavelength range of 0.78-1 µm, which is only a fraction higher than spectral sensitivity of the human eye. Thermal imaging units operate in wavelength range 3-555 µm (MWIR or medium wave infrared) and 8-14 µm (LWIR or long wave infrared). In this wavelength band, ground surface atmospheric layers are transparent for IR radiation and emissivity of observed objects with temperatures -50 - +50°C is the highest.
The thermal imager is an electronic observation device, creating the image of temperature difference in an observed area of space. The fundamental component of every thermal imager is a microbolometer array (thermal sensor) and each picture element of this array (pixel) can measure temperature with high precision.

The advantage of thermal imagers lies in the fact that they do not need any external sources of illumination, they are passive systems which work well in both the daytime and pitch-black nighttime conditions. As mentioned before bad weather conditions such as fog or rain do not create obstacles for thermal imager, these conditions would make ordinary night vision units completely useless.
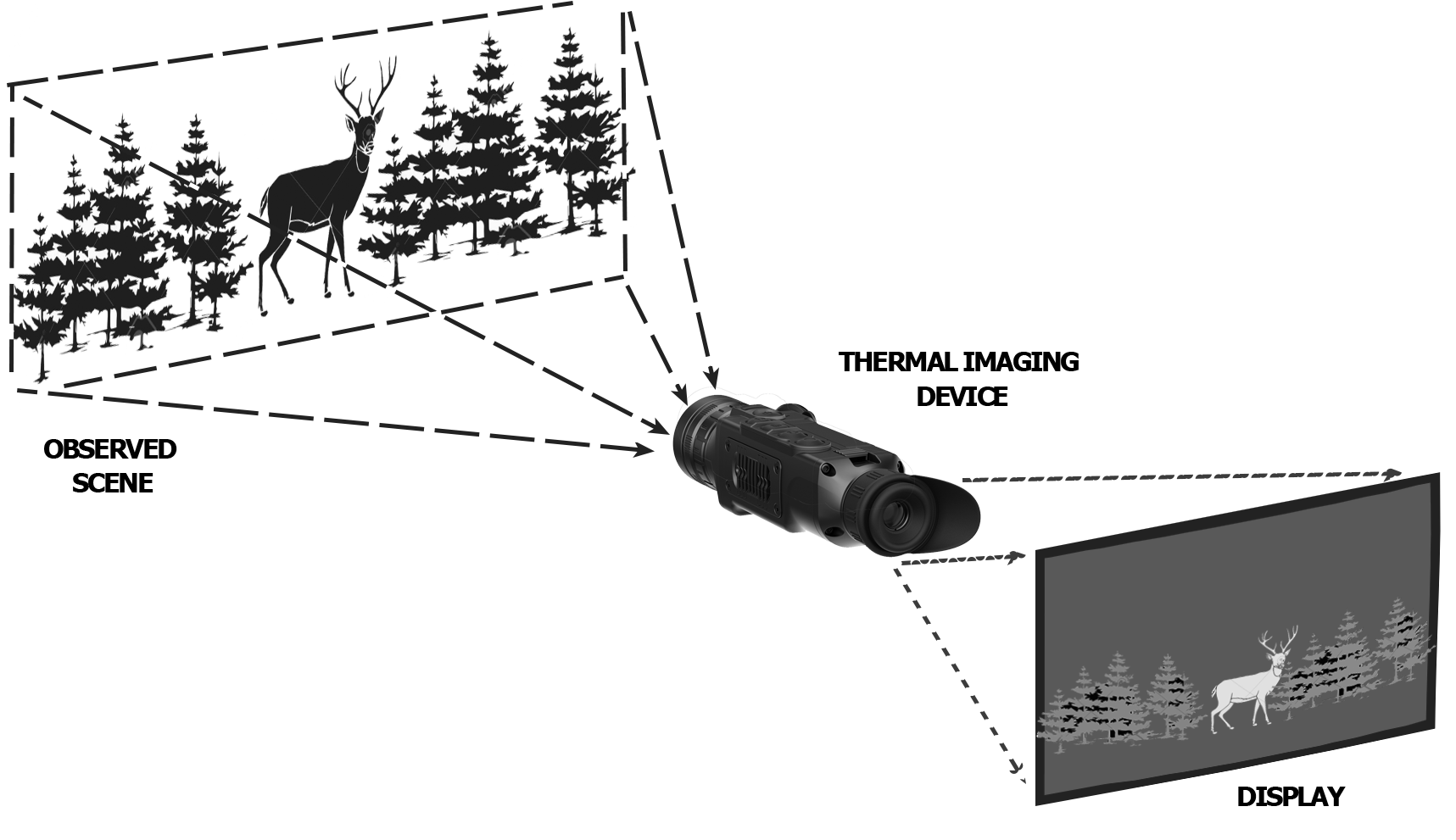
The operation of all thermal imaging devices can be simply described in the following way:
- The objective lens of the thermal imager shapes a temperature map of anything in the field of view on to the thermal sensor surface (also called temperature difference map)
- The microprocessor and other electronic elements read data from the thermal sensor, process it and create shape in the display, that represents a visual interpretation of the data. This image is then viewed by an observer through an eyepiece or directly on a screen.
Thermal imagers have more in common with digital night vision devices than image intensified night vision devices (commonly referred to as analogue systems) and allow for a greater number of user-defined settings and adjustments.
For instance, brightness and contrast settings, image colour settings, the introduction of auxiliary information in the field of view (current time, battery charge level, icons of active modes etc.), digital zoom, picture-in-picture (displays zoomed image of the observed object or its part in an additional small window) and display OFF functions (used for energy saving and avoiding backlight exposure).
Thermal imaging and digital riflescopes can also have many functions that can aide the shooter such as multiple selectable reticles with various shapes and colours, convenient and fast zeroing functions like “one-shot zeroing” and “Freeze” zeroing, automatic distance-related correction functions, multiple zeroing profiles for different rifles, an indication of side tilt, elevation angle and many more.
In comparison with analogue night vision riflescopes, the reticle in digital and thermal imaging devices is usually “digital”, i.e. the reticle image is overlaid on the scene image by video processing. With the image of the observed object and reticles being located in the same plane (the display plane) effects such as parallax are eliminated. The reticle is moved electronically which allows for the removal of the mechanical correction elements usually found on analogue riflescopes. Therefore these mechanical correction elements, that require a costly precision manufacturing and assembly process, can be enitely removed from digital and thermal devices.
Thermal imagers can also have built-in video recorders for capturing images and videos of observed objects and many other auxiliary functions, such as wireless data (photo, video) transmission (radio channel, Wi-Fi) to external devices, remote control of the unit (using a mobile device for instance), integration with a laser rangefinder (with data from rangefinder appearing on the screen of the unit) and integration with GPS-sensors (geopositioning) etc.
 Thermion 2 LRF XL50
Thermal Imaging Riflescope
Thermion 2 LRF XL50
Thermal Imaging Riflescope
 Thermion 2 LRF
Thermal Imaging Riflescopes
Thermion 2 LRF
Thermal Imaging Riflescopes
 Talion
Thermal Imaging Riflescopes
Talion
Thermal Imaging Riflescopes
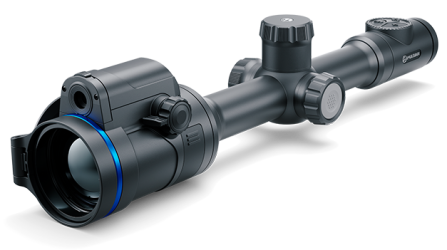
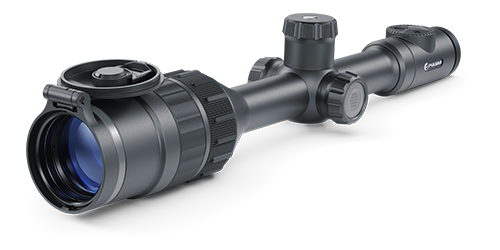
 Thermion 2
Thermal Imaging Riflescopes
Thermion 2
Thermal Imaging Riflescopes
 Merger LRF XL50
Thermal Imaging Binoculars
Merger LRF XL50
Thermal Imaging Binoculars
 Merger LRF XP50
Thermal Imaging Binoculars
New
Merger LRF XP50
Thermal Imaging Binoculars
New Merger LRF XP35
Thermal Imaging Binoculars
Merger LRF XP35
Thermal Imaging Binoculars
 Merger LRF XQ35
Thermal Imaging Binoculars
New
Merger LRF XQ35
Thermal Imaging Binoculars
New Telos
Thermal Imaging Monoculars
Telos
Thermal Imaging Monoculars
 Axion 2 LRF
Thermal Imaging Monoculars
Axion 2 LRF
Thermal Imaging Monoculars
 Axion 2
Thermal Imaging Monoculars
New
Axion 2
Thermal Imaging Monoculars
New Axion XQ30 PRO
Thermal Imaging Monoculars
Axion XQ30 PRO
Thermal Imaging Monoculars
 Krypton 2
Thermal Imaging Monocular
Krypton 2
Thermal Imaging Monocular
 Axion XM30F
Thermal Imaging Monoculars
Axion XM30F
Thermal Imaging Monoculars
 Pulsar Digex-XS
External Infrared Illuminators
Pulsar Digex-XS
External Infrared Illuminators
 APS Batteries
Battery Packs
APS Batteries
Battery Packs
 APS Chargers
Battery Chargers
APS Chargers
Battery Chargers
 IPS Batteries
Battery Packs
IPS Batteries
Battery Packs
 IPS Battery Charger
Battery Charger
IPS Battery Charger
Battery Charger
 Rifle Mounts
for Pulsar Riflescopes
Rifle Mounts
for Pulsar Riflescopes
 H7 Spacers
Repair Kits
New
H7 Spacers
Repair Kits
New PSP-V Weaver Rail Adapter
Adapter
PSP-V Weaver Rail Adapter
Adapter
 PSP Ring Adapters
Adapters
New
PSP Ring Adapters
Adapters
New PSP-B Ring Adapters
Ring Adapters
PSP-B Ring Adapters
Ring Adapters
 FN Adapters
Cover Ring Adapters
FN Adapters
Cover Ring Adapters
 Remote Controls
for digital devices and thermal imagers
Remote Controls
for digital devices and thermal imagers
 C-Clamp Mount
Pulsar Accessories
C-Clamp Mount
Pulsar Accessories
 Tree mount
Pulsar Accessories
Tree mount
Pulsar Accessories
 Window Frame Mount
Pulsar Accessories
Window Frame Mount
Pulsar Accessories
 Helion Flip-Up Phone Mount
Pulsar Accessories
Helion Flip-Up Phone Mount
Pulsar Accessories
 Flat Glass Mount
Pulsar Accessories
Flat Glass Mount
Pulsar Accessories
 Neck Straps
Accessories
New
Neck Straps
Accessories
New Monocular Pulsar 3x20 B
Accessories
Monocular Pulsar 3x20 B
Accessories
 Thermal Zeroing Targets
Accessories
Thermal Zeroing Targets
Accessories
 Telos LRF Tripod Adapter
Pulsar Accessories
Telos LRF Tripod Adapter
Pulsar Accessories















 English
English German
German French
French Spanish
Spanish Italiano
Italiano English
English Lietuvių
Lietuvių