PARAMÈTRES PRINCIPAUX DES APPAREILS À IMAGERIE THERMIQUE
La résolution d’un capteur de température (microbolomètre) est un paramètre essentiel pour déterminer sa qualité. Il s’agit du nombre d’éléments sensibles constituant le capteur. Les capteurs avec un nombre élevé de pixels peuvent produire une image plus détaillée d’un objet.
Résolutions standard de capteurs d’imagerie thermique :
| Résolution du capteur |
Format d’image |
| 160х120 |
4:3 |
| 320х240 |
4:3 |
| 384х288 |
4:3 |
| 640х480 |
4:3 |
| 1024х768 |
4:3 |
Pas de pixel
Le pas de pixel correspond à la distance séparant le centre de deux pixels d’un microbolomètre. Pour les capteurs d’imagerie thermique, il est mesuré en microns (µm).
Taux de remplissage
Le taux de remplissage est le ratio de la surface sensible de tous les pixels par la surface totale occupée par les pixels. Les capteurs possédant un haut facteur de remplissage sont capables d’absorber une plus grande quantité d’énergie.
Grossissement
La valeur du grossissement indique combien de fois l’image observée (à l’aide d’un appareil optique) est plus grande que la même image observée à l’œil nu. Le pouvoir de grossissement n’a pas d’unité de mesure (symbole “x”, par ex. 2x indique un “pouvoir de grossissement x 2”).
Pour les appareils d’imagerie thermique les valeurs classiques se situent entre 1x et 5x, puisque la tâche principale des appareils de vision nocturne est la détection et la reconnaissance d’objets dans des conditions de faible luminosité ou des conditions météorologiques défavorables. La hausse du grossissement des appareils à imagerie thermique provoque une diminution considérable de la vitesse de l’objectif (ou de l’ouverture relative), ce qui provoque une chute significative du contraste de l’arrière-plan. La baisse de la vitesse de l’objectif, dûe à la hausse du grossissement, est compensée par la hausse de son ouverture à la lumière mais ceci, en retour, entraîne une augmentation globale des dimensions, du poids de l’appareil et des complications dans la conception de l’optique. Tous ces facteurs réduisent le confort d’observation des imageurs thermiques et font grimper significativement leur prix.
Le confort est extrêmement important pour les lunettes de visée à imagerie thermique car le tireur doit tenir dans ses mains la lunette et l’arme. Un fort grossissement provoque également des difficultés dans la recherche et la traque d’une cible, en particulier si la cible est en mouvement, puisque l’augmentation du grossissement réduit le champ de vision.
Le grossissement est défini par les distances focales de l’objectif et de l’oculaire et par le coefficient d’agrandissement (K), égal au rapport des grandeurs physiques (diagonales) de l’écran et du capteur :
Où :
f objectif – la distance focale de l’objectif
f oculaire – la distance focale de l’oculaire
L écran – la diagonale de l’écran
L capteur – la diagonale du capteur
Relations avec le grossissement :
Plus la focale de l’objectif et la taille de l’écran sont grandes, plus le grossissement est élevé.
Plus la focale de l’oculaire et la taille du capteur sont grandes, moins le grossissement est élevé.
Champ de vision
Le champ de vision est défini par la grandeur de l’espace qui peut être vu à travers l’appareil optique à une distance définie. Le champ de vision est exprimé en degrés (le champ de vision angulaire est indiqué sur l’image ci-dessous par 2Ѡ) ou en mètres comme la distance spécifique (m) (en général 100m) à l’objet observé (le champ de vision linéaire est indiqué comme A sur l’image).
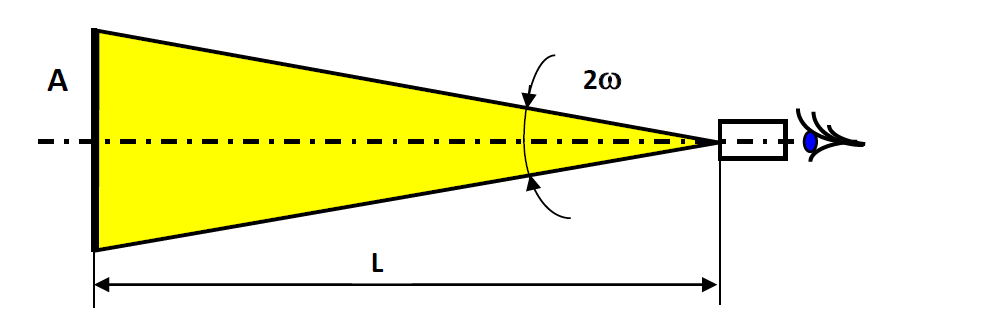
Le champ de vision d’un appareil de vision numérique nocturne est défini par la distance focale de l’objectif (f objective lens) et par la la taille physique du capteur (B). À des fins calculatoires, on prend en général la largeur (grandeur horizontale) comme taille physique du capteur, et on obtient le champ de vision horizontal :

Si la verticale ou la diagonale du capteur sont connues, il est possible de calculer le champ de vision vertical ou diagonal de la même façon.
Plus le champ de vision est large, plus l’observation est confortable, puisque vous n’avez pas besoin de déplacer l’appareil constamment pour voir la partie ou l’espace désiré.
Il est important de comprendre que le champ de vision est inversement proportionnel au grossissement – autrement dit, le grossissement augmente lorsque le champ de vision rétrécit. C’est l’une des raisons pour lesquelles on ne fabrique pas de systèmes infrarouges (les imageurs thermiques en particulier) dotés d’un fort grossissement. Il est également important de comprendre qu’un élargissement du champ de vision rend la détection et la reconnaissance plus difficiles.
Relation avec le champ de vision :
Plus la taille du capteur est élevée ou plus la focale de l’objective est courte, plus l’angle de vision angulaire est large.
Fréquence d’image
La fréquence d’image est l’une des caractéristiques principales d’un appareil à imagerie thermique. Du point de vue de l’utilisateur, elle correspond au nombre d’images affichées à l’écran par seconde. Elle se mesure habituellement en Hertz (Hz), où 1 Hz équivaut à 1 image par seconde (ou 1 fps, frame per second). Plus la valeur de la fréquence est élevée, moins il y aura d’effet de ralentissement dans l’image produite par l’appareil thermique par rapport à la scène réelle. L’observation de scènes dynamiques avec un imageur thermique d’une fréquence de 9 fps affichera une image floue et les mouvements de l’objet sembleront lents et saccadés. À l’inverse, plus la fréquence d’image est élevée, plus le rendu de scènes dynamiques sera fluide.
Résolution & facteurs influençant la résolution
La résolution dépend des paramètres des éléments de l’appareil optiques, du capteur, de l’écran, de la qualité des composants électroniques et des algorithmes logiciels utilisés. La résolution d’un appareil à imagerie thermique (pouvoir de résolution) est une valeur complexe, composée d’une résolution thermique et d’une résolution spatiale. Jetons un œil à ces deux grandeurs :
- Résolution thermique (NETD – Noise Equivalent Temperature Difference)
En simples termes c’est la sensibilité de l’appareil, soit le moindre écart de température détectable, et c’est le rapport entre le signal de l’objet et le signal de l’arrière-plan qui prend en compte le bruit du signal depuis le capteur thermique de l’imageur. Une résolution thermique est correcte quand l’imageur thermique est capable d’afficher un objet à une certaine température sur un arrière-plan d’une température très proche, et plus l’écart de température entre l’objet et l’arrière-plan que peut afficher l’appareil est moindre, meilleure est la résolution thermique.
- Résolution spatiale
La résolution spatiale détermine la capacité d’un appareil à afficher séparément deux points ou deux lignes très proches l’un de l’autre. Dans les spécifications techniques d’un appareil ce paramètre peut être spécifié comme “résolution”, “résolution limite”, ou encore “résolution maximale”.
La résolution d’un appareil est souvent déterminée par la résolution spatiale du capteur thermique (microbolomètre) car la résolution spatiale de l’optique dépasse de loin celle du capteur thermique.
En règle générale, la résolution spatiale se mesure en lignes par millimètre mais elle peut également être exprimée en unités d’angle (secondes ou minutes). Plus le nombre de lignes par millimètres est élevé, plus la résolution est grande. Et plus la résolution de l’appareil est grande, plus l’image vue par l’observateur est nette.
Une pièce particulière s’occupe de mesurer la résolution d’un appareil, il s’agit du collimateur, qui crée une image de test – courbe test de température cible. En observant le graphique à travers l’appareil optique, il est possible d’estimer sa résolution – plus les lignes séparées sont fines, meilleure est la résolution de l’appareil.
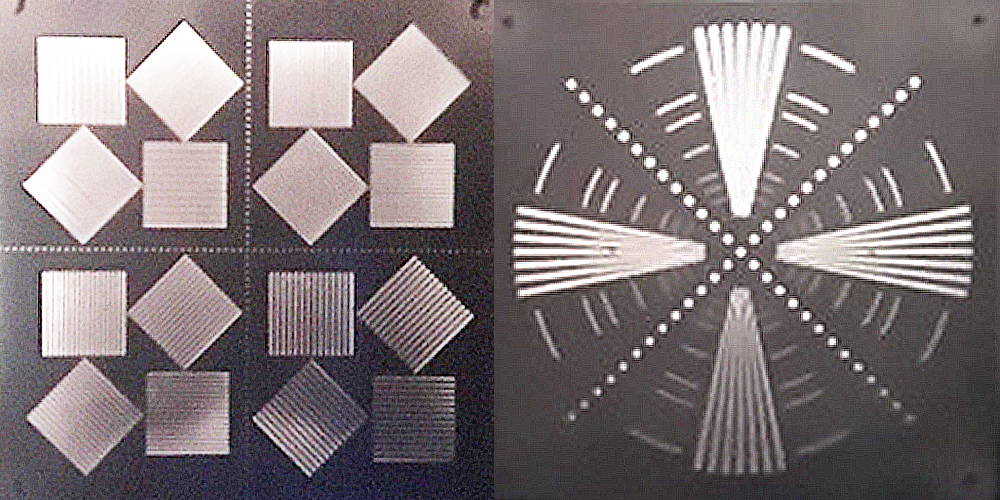 |
| Image : Différents types de diagrammes test d’un imageur thermique (vue d’un imageur thermique) |
La résolution dépend également de la résolution de l’objectif et de l’oculaire. L’objectif crée une image de l’objet observé sur la matrice plan focal et dans le cas où la résolution de l’objectif est basse, une amélioration supplémentaire de l’appareil est impossible. De la même manière, un oculaire de basse qualité peut “gâcher” l’image la plus nette produite à l’écran par l’appareil et ses composants.
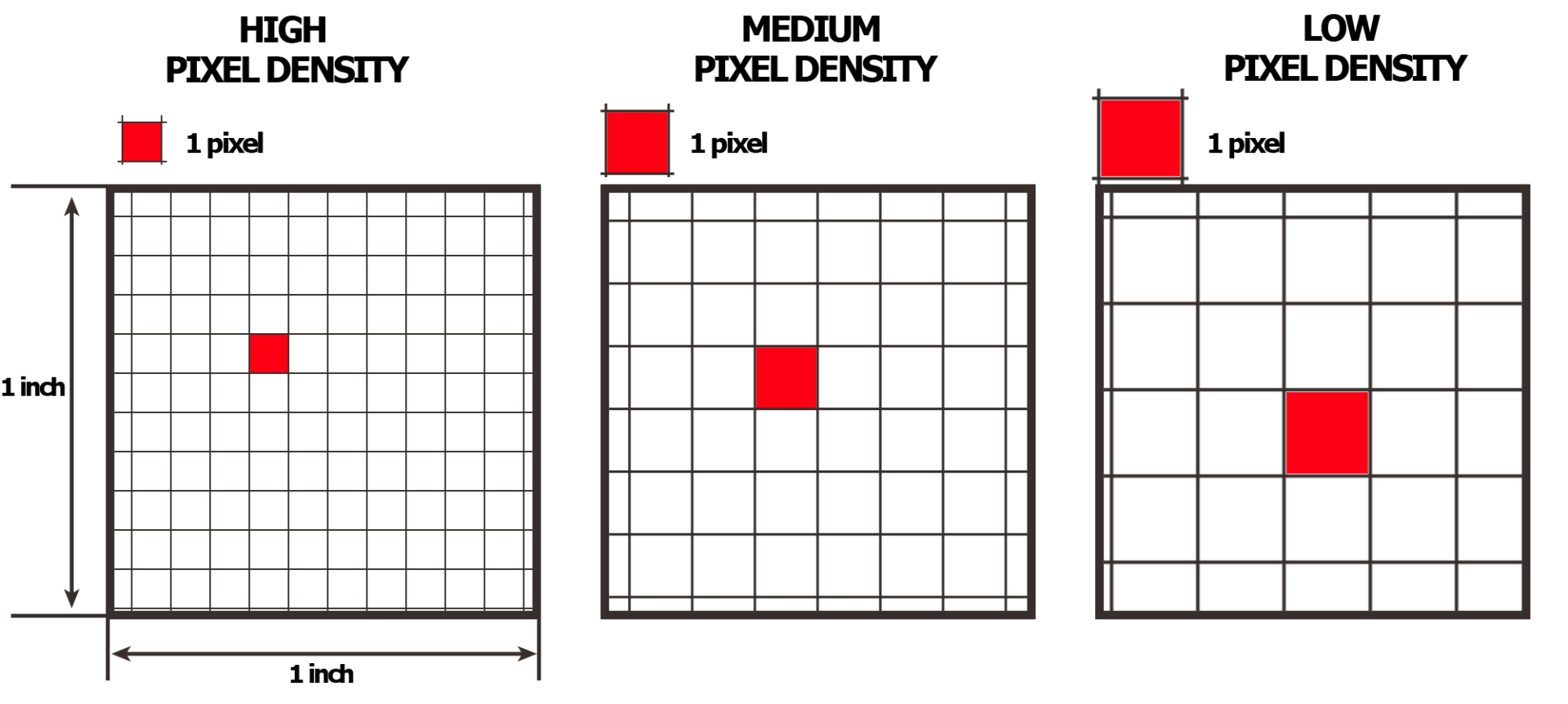
La résolution spatiale de l’appareil dépend encore des paramètres de l’écran. La résolution de l’écran est affichée de la même manière que celle du capteur – le nombre de pixels (horizontaux x verticaux) et leur taille. La densité de pixels est exprimée en PPI (pixels par pouce) – cette valeur donne le nombre de pixels présents sur une surface d’un pouce carré.
Les paramètres du capteur thermique influencent grandement la résolution de l’appareil. Généralement la résolution du capteur thermique (microbolomètre) dépend du nombre total de pixels (en général affiché comme le produit du nombre de pixels horizontaux par le nombre de pixels verticaux) et du pas de pixel. Ces deux critères sont la base pour l’estimation de la résolution.
Les imageurs thermiques utilisent différents algorithmes pour le traitement du signal qui peuvent influencer la résolution globale de l’appareil. On parle alors de “zoom numérique” lorsque l’image créée par la matrice plan focale est traitée et transférée à l’écran avec un grossissement. Dans ce cas, une légère baisse de la résolution se produit. Un phénomène semblable peut être observé dans les appareils photo numériques, dont le zoom est numérique.
Hormis les facteurs évoqués ci-dessus, certains facteurs supplémentaires pouvant provoquer une baisse de la résolution doivent être mentionnés. Ce sont principalement des types de “bruit” variés qui provoquent une distorsion du signal utile, ce qui provoque finalement une dégradation de la qualité de l’image. On distingue les types de bruit suivants :
Bruit de courant d’obscurité – la principale cause de ce type de bruit est l’émission thermoionique d’électrons (émission spontanée d’électrons qui résulte en un échauffement du matériel du capteur thermique). Plus la température est basse, plus le courant d’obscurité est faible, i.e. plus faible sera le bruit, et c’est précisément pour cette raison que l’obturateur est utilisé pour la calibration du microbolomètre.
Bruit de lecture – Lorsque le signal stocké dans un pixel est sorti du capteur, transformé en courant et amplifié, un bruit additionnel apparaît dans chaque élément, ce bruit est appelé bruit de lecture.
Différents algorithmes souvent appelés algorithmes de suppression du bruit servent à combattre ce bruit.
À part le bruit, la résolution peut être fortement réduite par les interférences électroniques qui surviennent à causes d’erreurs de conception de l’appareil (positions des cartes et câbles à l’intérieur de l’appareil) ou à cause d’erreur dans le tracé du circuit intégré (position des chemins conducteurs et qualité des couches d’isolation). Les interférences électroniques peuvent également être dues à des erreurs dans le circuit électronique de l’appareil telles qu’un mauvais choix d’éléments pour la fabrication des filtres dans le circuit d’alimentation. Ainsi la conception du circuit électronique, le développement logiciel pour le traitement du signal et le tracé du circuit imprimé sont des étapes importes dans l’élaboration des appareils à imagerie thermique.
Relation avec la résolution :
Plus le nombre de pixels est grand et la taille du capteur thermique est faible, meilleure est la résolution.
La formule est vraie si l’on compare des capteurs thermiques de même taille. Les capteurs thermiques d’une plus grande densité de pixels ont une meilleure résolution.
Distance d’observation
La distance d’observation estimée d’un appareil à imagerie thermique dépend de la combinaison d’un grand nombre de facteurs internes (paramètres du capteur, optique et électronique) et des conditions externes (différentes caractéristiques de l’objet observé, arrière-plan, clarté du ciel, etc.).
La distance d’observation se compose en général des distances de détection, de reconnaissance et d’identification. Chacune de ces distances est définie par les critères de Johnson selon lesquels la distance d’observation est directement liée à la température et à la résolution spatiale.
Pour mieux expliquer cette notion, il est nécessaire d’introduire la notion de taille critique de l’objet observé. La taille critique est la taille qui sert de base dans l’analyse de l’objet image pour déterminer les caractéristiques géométriques. Par exemple, la taille critique d’un sanglier, d’un cerf ou d’un humain équivaut à leur hauteur.
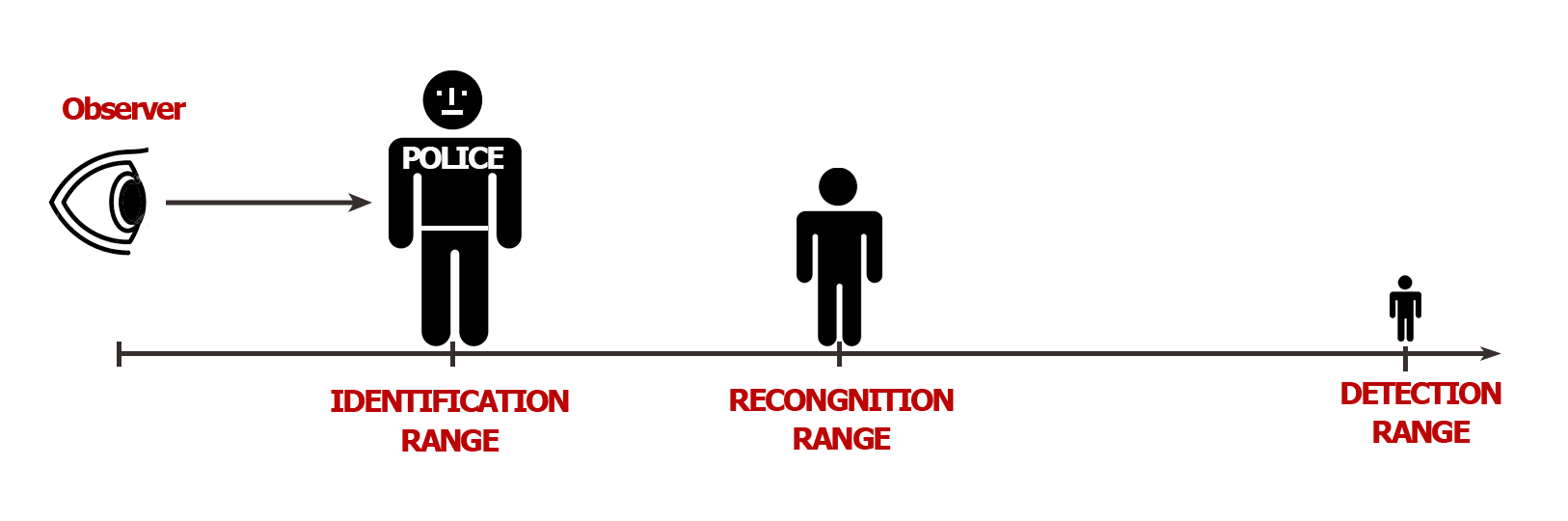
Distance de détection
La distance depuis laquelle la taille critique de l’objet observé peut tenir dans deux pixels ou plus du capteur thermique est appelée distance de détection. Détection signifie simplement que l’objet est visible à une certaine distance mais ne permet de donner aucune information sur ses caractéristiques (i.e. le type d’objet ne peut être déterminé).
Distance de reconnaissance
La reconnaissance d’un objet signifie que le type d’objet peut être défini. Ceci veut dire que l’observateur peut définir ce qu’il est en train d’observer, i.e. un humain, un animal, une voiture, etc. On considère que la reconnaissance est possible lorsque la taille critique de l’objet occupe au moins 6 pixels du capteur.
Distance d’identification
Du point de vue du chasseur, la distance la plus utile est la distance d’identification. Identification signifie que l’observateur peut évaluer non seulement le type d’objet, mais également ses caractéristiques (e.g. un sanglier mâle long d’1,2 m et haut de 0,7 m). Pour que cette condition soit obtenue, la taille critique de l’objet observé doit occuper au moins 12 pixels du capteur.
Il faut bien comprendre que dans tous les cas listés il y a une probabilité de détection, de reconnaissance ou d’identification de l’objet en question de 50%. Au plus il y a de pixels occupés par la taille critique de l’objet, au plus la probabilité de détection, de reconnaissance ou d’identification sera élevée.
Dégagement oculaire
Le dégagement oculaire est la distance de la surface externe de la dernière lentille de l’oculaire à l’œil de l’observateur pour laquelle l’image observée est la plus optimale (champ de vision maximal avec distorsions minimales). Ce paramètre est très important pour les lunettes de visée, où le dégagement oculaire ne doit pas être inférieur à 50mm (80-100mm est la distance optimale). Une telle valeur du dégagement oculaire est nécessaire pour éviter au tireur d’être blessé à cause du recul de l’arme lors du tir. En général dans les appareils à vision nocturne et thermique, le dégagement oculaire est égal à la longueur de l’oculaire nécessaire pour masquer la lumière émise par l’écran.
Calibration du capteur thermique
La calibration d’un appareil à imagerie thermique peut être décomposée en calibration d’usine et en calibration utilisateur. Le process de fabrication des appareils à imagerie thermique utilisant des microbolomètres non refroidis (les capteurs thermiques) nécessite une calibration d’usine de l’appareil (un objectif couplé à un capteur), qui requiert l’utilisation d’un équipement spécial.
La calibration d’usine n’enlève pas la nécessité d’une calibration par l’utilisateur lors de l’observation. Durant le fonctionnement de l’appareil, une calibration par l’utilisateur peut se faire à l’aide de l’obturateur interne qui couvre le capteur ou du cache qui couvre l’objectif et le capteur. Il convient de mentionner que la calibration à l’aide du cache de l’objectif fournit de meilleurs résultats puisqu’elle corrige en plus les défauts de l’image dus à l’émission parasite venant des composants et des lentilles de l’appareil. Certains appareils peuvent être calibrés depuis leur logiciel sans avoir à utiliser l’obturateur interne ou le cache de l’objectif.
La calibration par l’utilisateur est nécessaire si une surchauffe irrégulière du capteur thermique survient durant l’utilisation, ce qui crée du bruit et fait que l’appareil ne restitue pas correctement la scène. Lors du process de calibration différentes pièces du capteur sont évaluées et des calculs sont effectués pour uniformiser le signal, afin que l’appareil puisse reproduire une image correcte de la scène.

 Thermion 2 LRF XL50
Thermique Riflescope
Thermion 2 LRF XL50
Thermique Riflescope
 Thermion 2 LRF
Thermique Riflescope
Thermion 2 LRF
Thermique Riflescope
 Talion
Thermique Riflescope
Talion
Thermique Riflescope
 Thermion 2
Lunette d’imagerie thermique
Thermion 2
Lunette d’imagerie thermique
 Merger LRF XL50
Jumelles d'imagerie thermique
Merger LRF XL50
Jumelles d'imagerie thermique
 Merger LRF XP50
Jumelles d'imagerie thermique
Nouveau
Merger LRF XP50
Jumelles d'imagerie thermique
Nouveau Merger LRF XP35
Jumelles d'imagerie thermique
Merger LRF XP35
Jumelles d'imagerie thermique
 Merger LRF XQ35
Jumelles d'imagerie thermique
Nouveau
Merger LRF XQ35
Jumelles d'imagerie thermique
Nouveau Telos
Lunettes à l'imagerie thermique
Telos
Lunettes à l'imagerie thermique
 Axion 2 LRF
Lunettes à l'imagerie thermique
Axion 2 LRF
Lunettes à l'imagerie thermique
 Axion 2
Lunettes à l'imagerie thermique
Nouveau
Axion 2
Lunettes à l'imagerie thermique
Nouveau Axion XQ30 PRO
Lunettes à l'imagerie thermique
Axion XQ30 PRO
Lunettes à l'imagerie thermique
 Krypton 2
Lunettes à l'imagerie thermique
Krypton 2
Lunettes à l'imagerie thermique
 Axion XM30F
Lunettes à l'imagerie thermique
Axion XM30F
Lunettes à l'imagerie thermique
 Alimentations APS
Alimentations
Alimentations APS
Alimentations
 Chargeur de batterie APS
Chargeur de batterie
Chargeur de batterie APS
Chargeur de batterie
 Alimentations IPS
Alimentations
Alimentations IPS
Alimentations
 Chargeur de batterie IPS
Chargeur de batterie
Nouveau
Chargeur de batterie IPS
Chargeur de batterie
Nouveau PSP-V Weaver Rail Adapter
Adapter
Nouveau
PSP-V Weaver Rail Adapter
Adapter
Nouveau Adaptateurs PSP-B
Adaptateurs
Adaptateurs PSP-B
Adaptateurs
 Adaptateurs FN Cover Ring
Adaptateurs Cover Ring
Adaptateurs FN Cover Ring
Adaptateurs Cover Ring
 Télécommande sans fil
pour appareils numériques et imageurs thermiques
Télécommande sans fil
pour appareils numériques et imageurs thermiques
 C-CLAMP
Accessoires Pulsar
C-CLAMP
Accessoires Pulsar
 TREE MOUNT
Accessoires Pulsar
TREE MOUNT
Accessoires Pulsar
 SUPPORT POUR CADRE DE FENÊTRE
Accessoires Pulsar
SUPPORT POUR CADRE DE FENÊTRE
Accessoires Pulsar
 Support de téléphone HELION FLIP-UP
Accessoires Pulsar
Support de téléphone HELION FLIP-UP
Accessoires Pulsar
 Support flat glass
Accessoires Pulsar
Support flat glass
Accessoires Pulsar
 Draggone
Accessoires Pulsar
Nouveau
Draggone
Accessoires Pulsar
Nouveau Monoculaire Pulsar 3x20 B
Accessoires
Monoculaire Pulsar 3x20 B
Accessoires
 Cibles Thermiques pour Etalonnage
Accessoires
Cibles Thermiques pour Etalonnage
Accessoires
 Telos LRF Tripod Adapter
Accessoires Pulsar
Telos LRF Tripod Adapter
Accessoires Pulsar












 English
English German
German French
French Spanish
Spanish Italiano
Italiano English
English Lietuvių
Lietuvių