PRINCIPALES PARÁMETROS DE LOS DISPOSITIVOS DE IMAGEN TÉRMICA
La resolución del sensor térmico (microbolómetro) es un parámetro importante para evaluar la calidad del sensor. Es el número de elementos sensibles (píxeles) que constituyen el sensor. Los sensores con un gran número de píxeles pueden producir una imagen más detallada de un objeto.
Los tamaños estándar de los sensores de imagen térmica son:
| Resolución del sensor |
Relación de aspecto |
| 160х120 |
4:3 |
| 320х240 |
4:3 |
| 384х288 |
4:3 |
| 640х480 |
4:3 |
| 1024х768 |
4:3 |
Tamaño de píxel
El tamaño de píxel es la distancia entre los centros de dos píxeles de un microbolómetro. En los sensores de imagen térmica, se mide en micras (µm).
Factor de ocupación
El factor de ocupación es la relación entre la superficie sensible de todos los píxeles y el área total de los mismos. Los sensores con un factor de ocupación más alto pueden absorber una mayor cantidad de energía.
Aumento
El valor de aumento muestra cuántas veces es mayor la imagen observada (con la ayuda del dispositivo óptico) en comparación con el objeto observado a simple vista. La unidad de medida es la potencia de aumento (símbolo "x", p. ej., 2x - "potencia 2x").
En el caso de las unidades de imagen térmica, los valores típicos se sitúan en el rango de 1x a 5x, ya que la tarea principal de las unidades de visión nocturna es la detección y el reconocimiento de objetos en condiciones de poca luz o en condiciones meteorológicas desfavorables. El aumento de los aumentos de las unidades de imagen térmica conlleva una disminución considerable de la velocidad del objetivo (o apertura relativa), lo que se traduce en un descenso significativo del contraste con respecto al fondo. La disminución de la velocidad del objetivo con el aumento de la ampliación puede compensarse aumentando la apertura de la luz, pero esto, a su vez, provocará un aumento general de las dimensiones de la unidad, del peso y de la complicación del diseño de la óptica. Todos estos factores reducen la comodidad de uso de las unidades y aumentan considerablemente el precio de las cámaras termográficas.
La comodidad es muy importante para los visores de imágenes térmicas, porque el cazador tiene que sujetarlo con el arma en las manos. Los grandes aumentos también dificultan la búsqueda y el rastreo del objetivo, sobre todo si éste está en movimiento, ya que el aumento de los aumentos conlleva una disminución del campo de visión.
El aumento se define por la distancia focal de la lente del objetivo y del ocular y por el coeficiente de escala (K) que es igual a la relación de los tamaños físicos (diagonales) de la pantalla y del sensor:
Donde:
f lente objetivo – - la longitud focal de la lente objetivo
f ocular – la longitud focal del ocular
L pantalla –la diagonal de la pantalla
L sensor – la diagonal del sensor
Dependencias del aumento:
Cuanto mayor sea la distancia focal del objetivo y el tamaño de la pantalla, mayor será el aumento.
Cuanto mayor sea la distancia focal del ocular, tamaño del sensor, menor será el aumento.
Campo de visión
El campo de visión define el tamaño del espacio que puede verse a través del dispositivo óptico a una distancia definida.. El campo de visión suele indicarse en grados (el campo de visión angular se muestra en la imagen como 2Ѡ) o en metros para una distancia específica (M) (normalmente 100M) al objeto observado (el campo de visión lineal se muestra como A en la imagen).
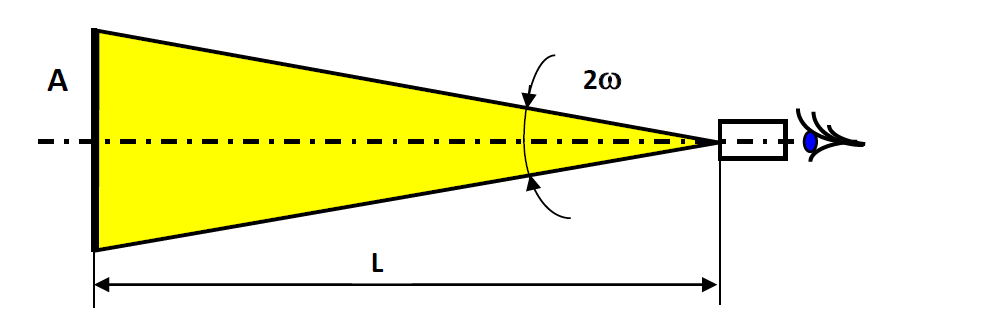
El campo de visión de un dispositivo digital de visión nocturna está definido por la distancia focal de la lente del objetivo (f lente del objetivo) y el tamaño físico del sensor (B). Para el cálculo, suelen utilizar la anchura (tamaño horizontal) como tamaño físico del sensor y en el resultado obtienen el campo de visión horizontal:

Si se conoce el tamaño vertical del sensor o el tamaño diagonal del sensor, es posible calcular el campo de visión vertical o diagonal de forma similar.
Cuanto más amplio sea el campo de visión, más cómoda será la observación, ya que no es necesario mover el aparato constantemente para ver la parte o el espacio necesario.
Es importante entender que el campo de visión es inversamente proporcional al aumento, lo que significa que cuando el aumento aumenta el campo de visión se reduce. Ésta es una de las razones por las que no se fabrican sistemas de infrarrojos (en particular, cámaras térmicas) con grandes aumentos. Al mismo tiempo, es importante comprender que un aumento del campo de visión conlleva una disminución del alcance de detección y reconocimiento.
Dependencia del campo de visión:
Cuanto mayor sea el tamaño del sensor o menor la distancia focal de la lente objetivo, mayor será el campo de visión angular.
Velocidad de fotogramas
La frecuencia de imagen es una de las principales características de un dispositivo de imagen térmica. Desde el punto de vista del usuario, es el número de fotogramas que se muestran en la pantalla en un segundo. Suele medirse en hercios (Hz), donde 1Hz equivale a 1 fotograma por segundo. Cuanto mayor sea el valor de la velocidad de fotogramas, menos visible será el efecto de desfase de la imagen producida por la cámara termográfica con respecto a la escena real. La observación de escenas dinámicas con una cámara termográfica con una frecuencia de 9 fps muestra una imagen borrosa y los movimientos de los objetos pueden parecer lentos y "bruscos". Por el contrario, cuanto mayor sea la velocidad de fotogramas, más suave será la representación de las escenas dinámicas.
Resolución y factores que influyen en la resolución
La resolución viene definida por los parámetros de los elementos ópticos de un aparato, el sensor, la pantalla, la calidad de los circuitos electrónicos y también por los algoritmos de software aplicados. La resolución de un dispositivo de imagen térmica (poder de resolución) es un valor complejo, que consta de resolución térmica y resolución espacial. Veamos cada una de ellas por separado:
- Resolución térmica (NETD – Diferencia de temperatura equivalente al ruido)
En términos sencillos, se trata de la sensibilidad del dispositivo o de la mínima diferencia de temperatura detectable y es una relación entre la señal del objeto y la señal del fondo que tiene en cuenta la señal de ruido del sensor térmico de una cámara termográfica. Una buena resolución térmica significa que una cámara termográfica puede mostrar un objeto con una temperatura determinada sobre el fondo con una temperatura muy próxima y cuanto menor sea la diferencia entre las temperaturas del objeto y del fondo que se puede mostrar, mayor será la resolución térmica.
- Resolución espacial
La resolución espacial caracteriza la capacidad de los aparatos para mostrar por separado dos puntos o líneas muy próximos. En las especificaciones técnicas de un aparato, este parámetro puede especificarse como "resolución", "límite de resolución", "resolución máxima", que es lo mismo.
A menudo, la resolución del dispositivo viene determinada por la resolución espacial del sensor térmico (microbolómetro), porque la resolución espacial de la óptica supera con creces la del sensor térmico.
Por regla general, la resolución espacial se define en líneas por milímetro, pero puede especificarse en unidades angulares (segundos o minutos). Cuanto mayor sea el valor de la resolución en líneas por milímetro, mayor será la resolución. Cuanto mayor sea la resolución del aparato, más clara será la imagen que vea el observador.
Para medir la resolución se utiliza un equipo especial llamado colimador, que crea una imagen de imitación de una carta de prueba - objetivo de prueba de líneas térmicas. Mirando la carta de prueba a través del dispositivo óptico se puede conocer la resolución de la cámara termográfica: cuanto más pequeñas sean las líneas que se ven por separado, mayor será la resolución del dispositivo.
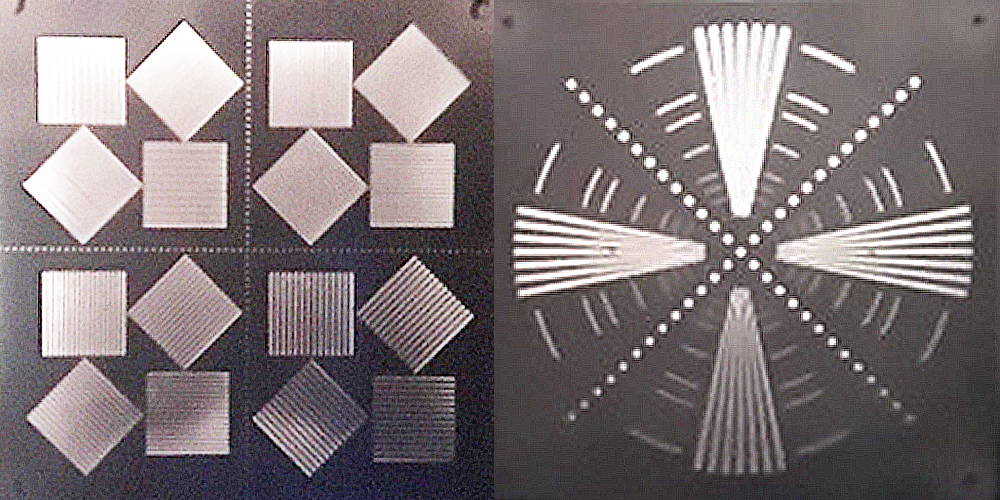 |
| Imagen: Varios tipos de gráficos de prueba de imagen térmica (vista de imagen térmica) |
La resolución también depende de la resolución de la lente del objetivo y del ocular. La lente del objetivo crea una imagen de un objeto observado en el conjunto del plano focal y, en el caso de que la resolución de la lente del objetivo sea baja, es imposible mejorar la resolución de la unidad. Del mismo modo, un ocular de baja calidad puede "estropear" la imagen más nítida producida por el aparato y sus componentes en la pantalla.
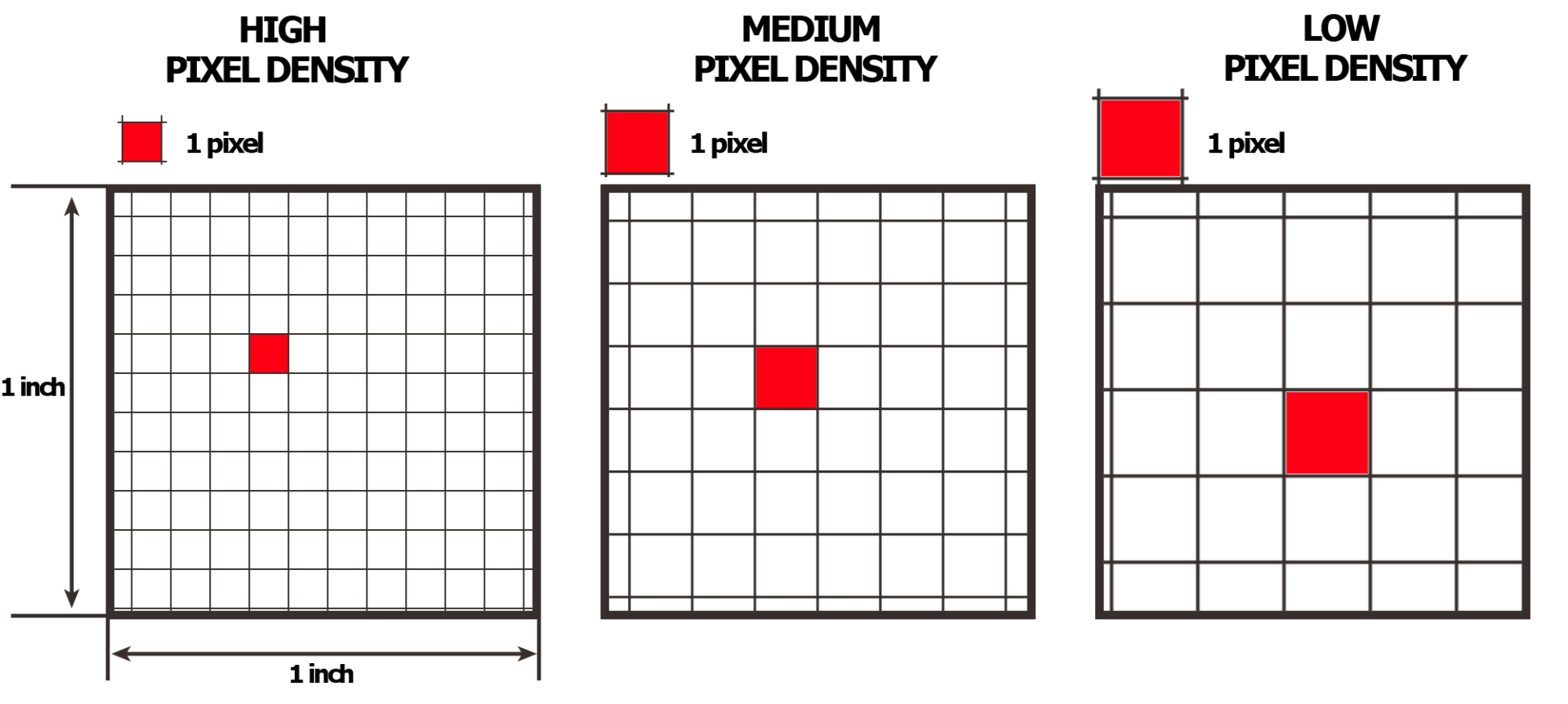
La resolución espacial del aparato también depende de los parámetros de la pantalla. Como en el caso del sensor, la resolución de la pantalla se muestra de forma similar: el número de píxeles (horizontales x verticales) y su tamaño. La densidad de píxeles se caracteriza por un valor como PPI (píxel por pulgada) - este valor muestra el número de píxeles en un área de una pulgada.
Los parámetros del sensor térmico influyen mucho en la resolución del dispositivo. Principalmente, la resolución del sensor térmico (microbolómetro) es el número total de píxeles (normalmente se muestra como número horizontal de píxeles x número vertical de píxeles) y el paso de píxeles. Estos dos criterios constituyen la base principal para evaluar la resolución.
Las cámaras termográficas pueden utilizar diferentes algoritmos para el procesamiento de la señal que pueden influir en la resolución global de la unidad. Principalmente se habla de "zoom digital" cuando la imagen creada por el conjunto de planos focales se procesa y se transfiere a la pantalla con aumento. En este caso, se produce una ligera disminución de la resolución global. Un efecto similar puede observarsce en las cámaras fotográficas digitales cuando se utiliza el zoom digital.
Aparte de los factores descritos anteriormente, hay que mencionar algunos factores adicionales que pueden reducir la resolución. Principalmente se trata de varios tipos de "ruido" que distorsionan la señal útil y, a la larga, empeoran la calidad de la imagen. Se pueden distinguir los siguientes tipos de ruido:
Ruido de corriente residual – la razón principal de la aparición de este tipo de ruido es la emisión de electrones termoiónicos (emisión espontánea de electrones que provoca el calentamiento del material del sensor térmico). Cuanto menor sea la temperatura, menor será la señal de corriente oscura, es decir, menor será el ruido, y precisamente para ello se utiliza el obturador y la calibración del microbolómetro.
Ruido de lectura – Cuando la señal almacenada en un píxel se extrae del sensor, se convierte en tensión y se amplifica, aparece un ruido adicional en cada elemento, y este ruido se llama ruido de lectura.
Para combatir el ruido se aplican diversos algoritmos de software, a menudo denominados algoritmos de supresión de ruido.
Aparte del ruido, la resolución puede verse muy disminuida por las interferencias electrónicas que aparecen por errores en el diseño de la unidad (colocación de las placas y los cables dentro de la unidad) o por errores en el trazado de la placa (posición de las vías conductoras y calidad de las capas de apantallamiento). Las interferencias electrónicas también pueden ser causadas por errores en los circuitos electrónicos de la unidad, como la selección incorrecta de los elementos para hacer los filtros dentro de los circuitos de potencia. Por tanto, el diseño de los circuitos electrónicos, el desarrollo del software para el procesamiento de la señal y el trazado de la placa son tareas importantes en el diseño de los dispositivos de imagen térmica.
Dependencia de la resolución:
Cuanto mayor sea el número de píxeles y menor su tamaño del sensor térmico, mejor será la resolución.
The statement is true when compared thermal sensors are of the same physical size. Thermal sensors with a greater pixel density have a better resolution.
Esta afirmación es cierta cuando se comparan sensores térmicos del mismo tamaño físico. Los sensores térmicos con mayor densidad de píxeles tienen mejor resolución.
Alcance de observación
Es el rango de observación citado de un dispositivo de imagen térmica depende de la combinación de un gran número de factores internos (parámetros del sensor, óptica y electrónica) y de las condiciones externas (diversas características del objeto observado, fondo, claridad de la atmósfera, etc.).
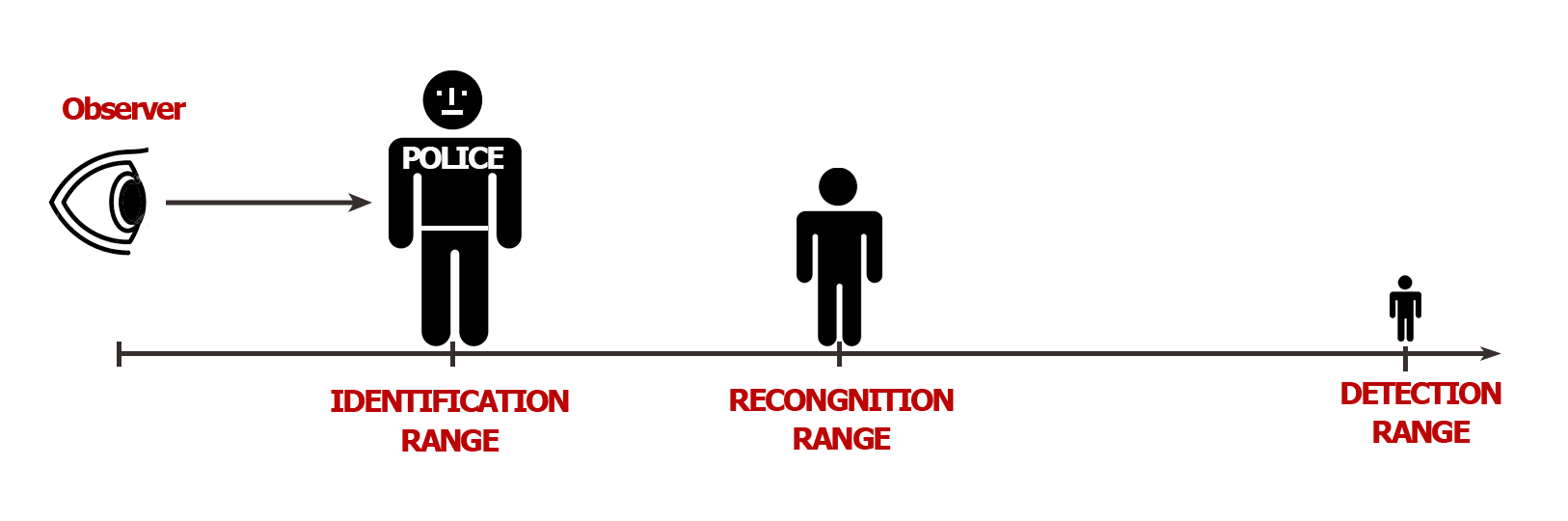
El alcance de observación suele dividirse en alcance de detección, alcance de reconocimiento y alcance de identificación. Cada uno de estos rangos se define según los criterios de Johnson, según los cuales el rango de observación está directamente relacionado con la temperatura y la resolución espacial.
Para explicar completamente este tema, es necesario introducir la noción de tamaño crítico de un objeto observado. El tamaño crítico es el tamaño que sirve de base para el análisis de la imagen del objeto para encontrar sus rasgos geométricos característicos. Por ejemplo, el tamaño crítico de un jabalí, un corzo o un humano es la altura de su cuerpo.
Rango de detección
Es la distancia en la que el tamaño crítico de un objeto observado puede caber en dos o más píxeles de un sensor de imagen térmica se denomina rango de detección. La detección solo significa que el objeto es visible a una determinada distancia, pero no da ninguna información sobre sus características (es decir, no se puede determinar el tipo de objeto).
Alcance de reconocimiento
Es el reconocimiento de un objeto significa que se puede definir el tipo de objeto. Esto significa que el observador puede discernir lo que se está observando, es decir, un ser humano, un animal, un coche, etc. Se considera que el reconocimiento es posible cuando el tamaño crítico de un objeto puede caber en al menos 6 píxeles del sensor.
Alcance de la identificación
Desde el punto de vista del cazador, el rango más útil es el de identificación.. La identificación significa que el observador puede evaluar no solo el tipo de objeto, sino también sus rasgos característicos (por ejemplo, un macho de jabalí de 1,2 m de largo y 0,7 m de alto) Para que se dé esta condición, el tamaño crítico de un objeto debe caber en al menos 12 píxeles del sensor.
Es importante entender que en todos los casos enumerados hay un 50% de probabilidad de detección, reconocimiento o identificación del objeto especificado. Cuantos más píxeles cubra el tamaño crítico de un objeto, mayor será la probabilidad de detección reconocimiento o identificación.
Relieve ocular
El relieve ocular es la distancia desde la superficie externa de la lente del último ocular hasta la superficie del ojo del observador en la que la imagen observada es la más óptima (máximo campo de visión con mínimas distorsiones). Este parámetro es muy importante para los visores, en los que el alivio ocular no debe ser inferior a 50 mm (lo óptimo es 80-100 mm). Un valor tan alto de alivio ocular es necesario para evitar que el tirador se lesione debido al retroceso al realizar un disparo. Por regla general, en las unidades de visión nocturna y de imagen térmica, el alivio ocular es igual a la longitud de la copa del ojo que es necesaria para camuflar la luz emitida por la pantalla.
Calibración del sensor térmico
La calibración de un dispositivo de imagen térmica puede dividirse en calibración de fábrica y calibración definida por el usuario. El proceso de fabricación de los dispositivos de imagen térmica que utilizan microbolómetros no refrigerados (sensores térmicos) necesita una calibración de fábrica del dispositivo (lente objetivo emparejada con el sensor) que requiere el uso de un equipo especial.
La calibración de fábrica no elimina la necesidad de una calibración definida por el usuario durante la observación. Durante el funcionamiento del dispositivo, se puede realizar una calibración definida por el usuario con la ayuda de un obturador interno que cubra el sensor o de una tapa que cubra la lente del objetivo y el sensor. Cabe mencionar que la calibración con la ayuda de la tapa del objetivo proporciona el mejor resultado porque corrige adicionalmente los defectos de la imagen causados por la emisión parasitaria procedente de las piezas del aparato y de las lentes. Algunos dispositivos se calibran mediante software sin utilizar el obturador o la tapa del objetivo.
La calibración definida por el usuario es necesaria debido a que el sensor térmico se calienta de forma desigual durante el uso y esto introduce ruido, lo que hace que la unidad represente la escena observada de forma incorrecta. Durante el proceso de calibración se evalúan diferentes partes del sensor y se realizan cálculos para nivelar la señal, lo que hace que el aparato produzca una imagen correcta.

 Thermion 2 LRF XL50
Visores térmicos
Thermion 2 LRF XL50
Visores térmicos
 Thermion 2 LRF
Visores térmicos
Thermion 2 LRF
Visores térmicos
 Talion
Visores térmicos
Talion
Visores térmicos
 Thermion 2
Visores térmicos
Thermion 2
Visores térmicos
 Merger LRF XL50
Binoculares térmicos
Merger LRF XL50
Binoculares térmicos
 Merger LRF XP50
Binoculares térmicos
Nuevo
Merger LRF XP50
Binoculares térmicos
Nuevo Merger LRF XP35
Binoculares térmicos
Merger LRF XP35
Binoculares térmicos
 Merger LRF XQ35
Binoculares térmicos
Nuevo
Merger LRF XQ35
Binoculares térmicos
Nuevo Telos
Dispositivos térmicos
Telos
Dispositivos térmicos
 Axion 2 LRF
Dispositivos térmicos
Axion 2 LRF
Dispositivos térmicos
 Axion 2
Dispositivos térmicos
Nuevo
Axion 2
Dispositivos térmicos
Nuevo Axion XQ30 PRO
Dispositivos térmicos
Axion XQ30 PRO
Dispositivos térmicos
 Krypton 2
Dispositivos térmicos
Krypton 2
Dispositivos térmicos
 Axion XM30F
Dispositivos térmicos
Axion XM30F
Dispositivos térmicos
 Pulsar Digex-XS
Iluminadores Infrarrojos Externos
Pulsar Digex-XS
Iluminadores Infrarrojos Externos
 Paquetes de baterías APS
Paquetes de baterías
Paquetes de baterías APS
Paquetes de baterías
 Cargador de batería APS
Cargador de batería
Cargador de batería APS
Cargador de batería
 Paquetes de baterías IPS
Paquetes de baterías
Paquetes de baterías IPS
Paquetes de baterías
 Cargador de baterías IPS
Cargador de baterías
Cargador de baterías IPS
Cargador de baterías
 Montajes de fusil
para visores de Pulsar
Montajes de fusil
para visores de Pulsar
 Separadores H7
Kits de reparación
Nuevo
Separadores H7
Kits de reparación
Nuevo PSP-V Weaver Rail Adapter
Adapter
PSP-V Weaver Rail Adapter
Adapter
 PSP Ring Adapters
Adapters
Nuevo
PSP Ring Adapters
Adapters
Nuevo Adaptadores de anillos PSP-B
Adaptadores de anillos
Adaptadores de anillos PSP-B
Adaptadores de anillos
 Adaptadores de tapa FN
Adaptadores de tapa
Adaptadores de tapa FN
Adaptadores de tapa
 El control remoto inalámbrico
para dispositivos digitales y de imagen térmica
El control remoto inalámbrico
para dispositivos digitales y de imagen térmica
 Montura con sargento de sujeción
Accesorios Pulsar
Montura con sargento de sujeción
Accesorios Pulsar
 Montaje del árbol
Accesorios Pulsar
Montaje del árbol
Accesorios Pulsar
 Montaje de marco de ventana
Accesorios Pulsar
Montaje de marco de ventana
Accesorios Pulsar
 Soporte para teléfono plegable Helion
Pulsar Accessorios
Soporte para teléfono plegable Helion
Pulsar Accessorios
 Montaje de vidrio plano
Accesorios Pulsar
Montaje de vidrio plano
Accesorios Pulsar
 Correa para el cuello
Accessorios
Nuevo
Correa para el cuello
Accessorios
Nuevo Monocular Pulsar 3x20 B
Accesorios
Monocular Pulsar 3x20 B
Accesorios
 Calibrado de Objetivos Termográficos
Accesorios
Calibrado de Objetivos Termográficos
Accesorios
 Telos LRF Tripod Adapter
Accesorios Pulsar
Telos LRF Tripod Adapter
Accesorios Pulsar















 English
English German
German French
French Spanish
Spanish Italiano
Italiano English
English Lietuvių
Lietuvių