I PRINCIPALI PARAMETRI DEI DISPOSITIVI TERMICI
La risoluzione del sensore termico (microbolometro) è un parametro fondamentale per valutare la qualità del sensore stesso. Indica il numero di elementi sensibili (pixel) che costituiscono il sensore. I sensori che dispongono di un numero elevato di pixel possono generare un’immagine più dettagliata di un determinato oggetto.
Le dimensioni standard dei sensori termici sono qui riportate:
|
Risoluzione del sensore
|
Rapporto d’aspetto |
| 160х120 |
4:3 |
| 320х240 |
4:3 |
| 384х288 |
4:3 |
| 640х480 |
4:3 |
| 1024х768 |
4:3 |
Pixel pitch
Il pixel pitch è la distanza tra i centri di due pixel di un microbolometro. Nei sensori termici viene misurato in micron (µm).
Coefficiente di riempimento
È il rapporto tra la superficie sensibile di tutti i pixel e l’area complessiva dei pixel stessi. I sensori con un coefficiente di riempimento superiore sono in grado di assorbire una quantità maggiore di energia.
Ingrandimento
Il valore dell’ingrandimento indica quanto l’immagine osservata col dispositivo ottico sia più grande rispetto all’osservazione a occhio nudo. L’unità di misura è il potere d’ingrandimento (simbolo ‘x’, ad esempio 2x = ingrandimento 2x)Nei dispositivi termici i valori tipici sono compresi tra 1x e 5x, dato che il compito principale degli strumenti per la visione notturna è il rilevamento e il riconoscimento di oggetti in situazioni di luce scarsa o di condizioni meteorologiche sfavorevoli. L’aumento dell’ingrandimento in un dispositivo termico determina una notevole riduzione della velocità della lente (o della relativa apertura), che si traduce in un calo significativo del contrasto rispetto allo sfondo. La riduzione della velocità della lente dovuta all’aumento dell’ingrandimento può essere compensata incrementando l’apertura della luce; tuttavia ciò implica un aumento complessivo delle dimensioni e del peso del dispositivo, oltre a difficoltà nel design delle ottiche. Tutti questi fattori riducono la comodità di utilizzo degli strumenti e ne aumentano considerevolmente il costo.
La comodità è decisamente importante nel caso di un cannocchiale da puntamento termico, in quanto il tiratore deve maneggiarlo avendo anche un’arma in mano. Un ingrandimento elevato comporta anche difficoltà nella ricerca e tracciamento di un bersaglio, soprattutto se quest’ultimo è in movimento; infatti un aumento dell’ingrandimento riduce il campo visivo.
L’ingrandimento è determinato dalle distanze focali della lente dell’obiettivo e dell’oculare, e dal coefficiente di scala (K), che equivale al rapporto tra la dimensione fisica (diagonale) del display e quella del sensore, dove:
f lente obiettivo: distanza focale della lente dell’obiettivo
f oculare: distanza focale dell’oculare
L display: dimensione diagonale del display
L sensore: dimensione diagonale del sensore
Relazione tra ingrandimento e altri parametri:
Maggiore la distanza focale della lente dell’obiettivo e la dimensione del display, maggiore è l’ingrandimento
Maggiore la distanza focale dell’oculare e la dimensione del sensore, minore è l’ingrandimento
Campo visivo
Questo parametro indica la dimensione dello spazio che può essere osservato con un dispositivo ottico da una distanza specifica. Normalmente è indicato in gradi (il campo visivo angolare è denotato con ‘2Ѡ’ nell’immagine sottostante) oppure in metri per una distanza nota (M) dall’oggetto osservato (solitamente 100 metri). Il campo visivo lineare è indicato con A nell’immagine.
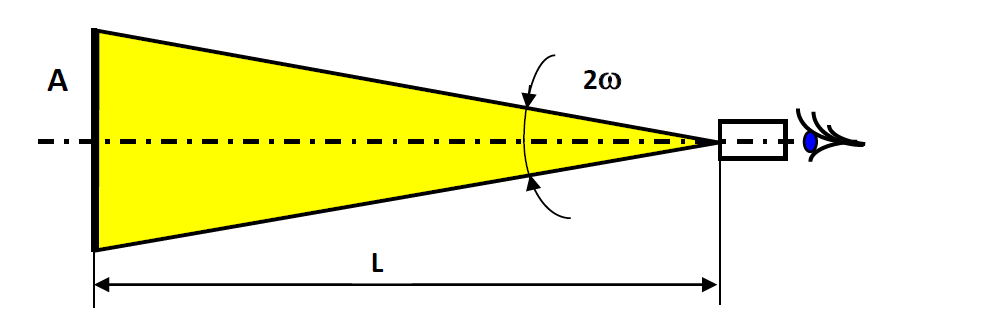
Il campo visivo degli strumenti digitali notturni è definito dalla distanza focale della lente dell’obiettivo (f lente obiettivo) e dalla dimensione fisica del sensore (B). Solitamente per il calcolo del campo visivo si utilizza l’ampiezza (dimensione orizzontale) come dimensione fisica del sensore, e il risultato è un campo visivo orizzontale:

Conoscendo la dimensione verticale o diagonale del sensore, allo stesso modo si può calcolare il campo visivo verticale o diagonale.
A un campo visivo più ampio corrisponde una maggiore comodità nell’osservare gli oggetti, non essendoci bisogno di continui movimenti del dispositivo per coprire lo spazio desiderato.
È importante comprendere che il campo visivo è inversamente proporzionale all’ingrandimento: aumentando quest’ultimo si riduce il campo visivo. Questo è uno dei motivi per cui i sistemi a infrarossi (soprattutto i visori termici) non vengono prodotti con ingrandimenti elevati. È altresì importante essere consapevoli che un aumento del campo visivo implica una riduzione della distanza di rilevamento e riconoscimento.
Relazione con il campo visivo:
Maggiore è la dimensione del sensore o minore la distanza focale della lente dell’obiettivo, maggiore è il campo visivo angolare.
Frame Rate
Il frame rate (frequenza dei fotogrammi) è uno dei parametri principali di uno strumento termico. Dal punto di vista dell’utente, indica il numero di fotogrammi mostrati sul display in un secondo. Viene normalmente misurato in Hertz (Hz), dove 1 Hz equivale a un fotogramma al secondo. Maggiore è il frame rate, meno percettibile è il ritardo nella riproduzione dell’immagine da parte del dispositivo termico rispetto al tempo reale. L’osservazione di scene dinamiche con un dispositivo termico che mostra 9 fotogrammi per secondo risulta in un’immagine sfocata, e i movimenti degli oggetti possono apparire rallentati e a scatti. Al contrario, con un frame rate superiore la resa delle scene dinamiche sarà più fluida.
La risoluzione e i fattori che la influenzano
La risoluzione è determinata dai parametri degli elementi ottici di un dispositivo, dal sensore, dal display, dai circuiti elettronici e anche dagli algoritmi software utilizzati. La risoluzione di un dispositivo termico (potere risolutivo) è un valore complesso, costituito da risoluzione termica e risoluzione spaziale. Vediamole più in dettaglio:
- Risoluzione termica (NETD – Noise Equivalent Temperature Difference)
In poche parole, è la sensibilità del dispositivo, o la più piccola differenza di temperatura rilevabile, ed equivale al rapporto tra il segnale di un oggetto e il segnale dello sfondo (background), tenendo in considerazione il segnale di disturbo del sensore termico presente in un visore termico. Una buona risoluzione termica significa che un visore termico è in grado di mostrare un oggetto con una certa temperatura su uno sfondo che ha una temperatura simile, e maggiore è la risoluzione termica minore è la differenza di temperatura tra oggetto e sfondo che può essere mostrata.
- Risoluzione spaziale
La risoluzione spaziale è la capacità da parte di uno strumento di mostrare separatamente due punti o linee adiacenti. Tecnicamente questo parametro può essere chiamato risoluzione, limite di risoluzione o risoluzione massima; fondamentalmente il significato è il medesimo. Spesso la risoluzione di uno strumento è determinata dalla risoluzione spaziale del sensore termico (microbolometro), in quanto la risoluzione spaziale delle ottiche è ampiamente superiore a quella del sensore termico. La risoluzione si indica normalmente in linee per millimetro oppure in unità angolari (secondi o minuti). Maggiore è il valore della risoluzione in linee per millimetro, maggiore è la risoluzione complessiva. A una superiore risoluzione dello strumento corrisponde un’immagine più nitida agli occhi dell’osservatore.
Per misurare la risoluzione si utilizza uno strumento chiamato collimatore. Quest’ultimo consente di creare un’immagine a imitazione di una tabella di prova, rappresentata da un oggetto con linee di prova termiche. Osservando con un dispositivo ottico questa tabella si può trarre una conclusione in merito alla risoluzione del visore termico: più piccole sono le linee che si possono vedere chiaramente separate le une dalle altre, maggiore è la risoluzione del dispositivo.
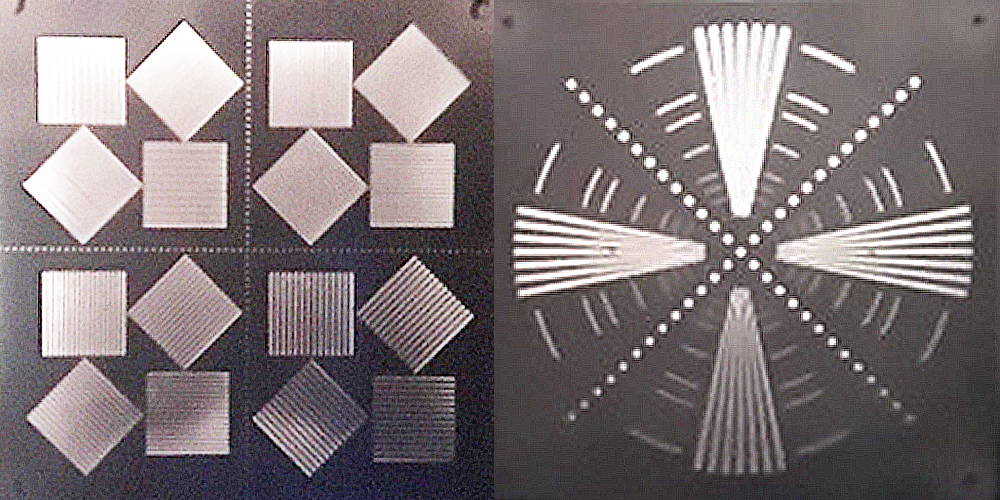 |
| Nell’immagine sopra: diversi modelli di tabelle di prova per la visione termica (immagine termica) |
La risoluzione è poi legata alla risoluzione delle lente dell’obiettivo e dell’oculare. La prima crea l’immagine dell’oggetto osservato sul vettore del piano focale, e nel caso la risoluzione della lente dell’obiettivo non sia sufficiente, un ulteriore miglioramento della risoluzione del dispositivo è impossibile. Analogamente un oculare di bassa qualità può deteriorare l’immagine altrimenti nitida ricreata sul display dagli altri componenti dello strumento.
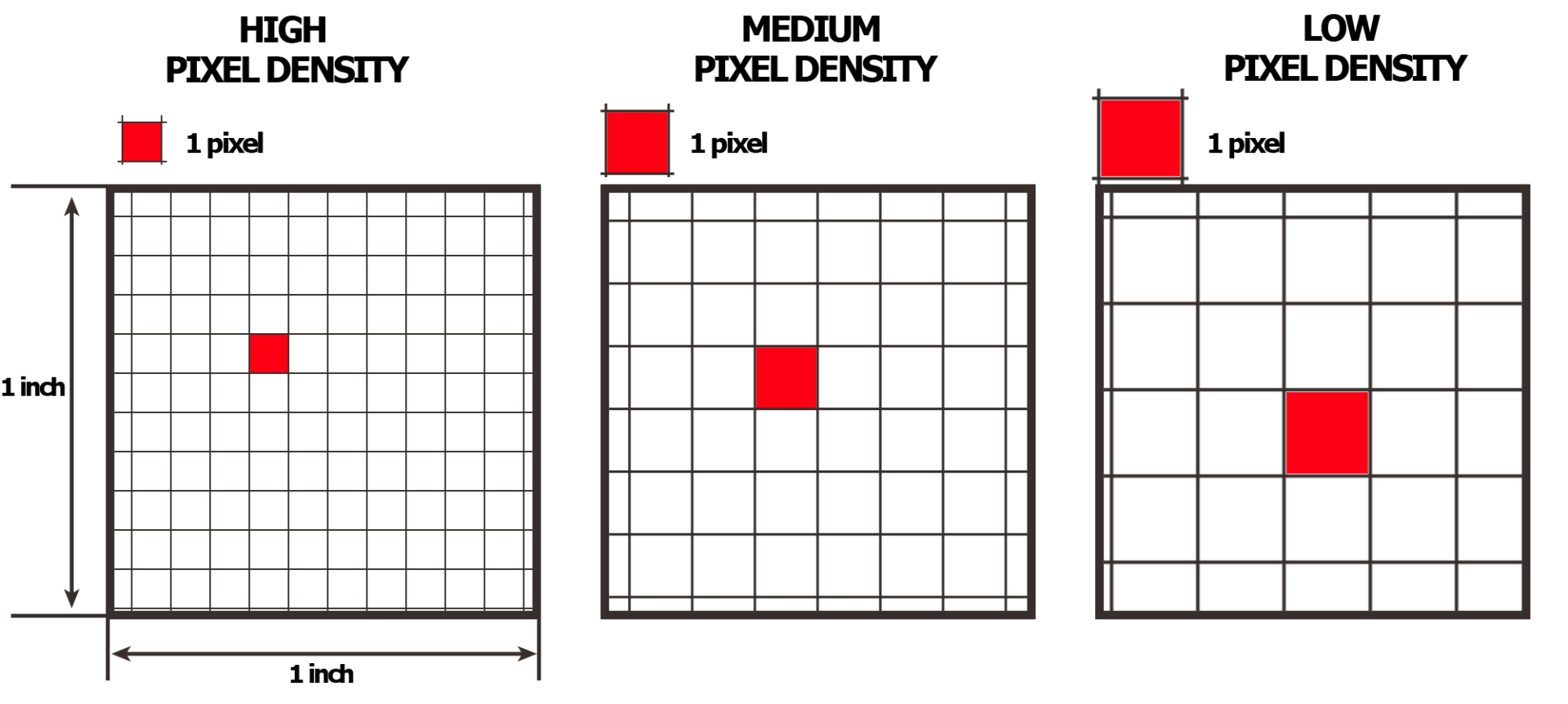
La risoluzione spaziale di un dispositivo è influenzata anche dai parametri del display utilizzato. Come avviene anche per il sensore, la risoluzione del display è indicata con il numero di pixel (orizzontali x verticali) e la loro dimensione. La densità dei pixel è indicata in PPI (pixel per pollice), che definisce il numero di pixel per pollice quadrato.
I parametri del sensore termico influenzano notevolmente la risoluzione del dispositivo. Essenzialmente la risoluzione del sensore termico (microbolometro) è data dal numero di pixel (solitamente indicato come numero di pixel orizzontali x numero di pixel verticali) e dal pixel pitch. Questi sono i due fattori principali per valutare la risoluzione.
I visori termici possono inoltre utilizzare diversi algoritmi di elaborazione del segnale, che possono avere un effetto sulla risoluzione complessiva del dispositivo. In particolare ci si riferisce allo ‘zoom digitale’ quando l’immagine creata sul vettore del piano focale viene elaborata e trasferita al display con un ingrandimento. In questo caso si verifica una leggera riduzione della risoluzione complessiva. Un effetto analogo è riscontrabile nelle fotocamere digitali quando viene usato lo zoom digitale.
Oltre ai fattori citati ve ne sono altri che meritano di essere menzionati e che possono abbassare la risoluzione del dispositivo. Sono disturbi di vario tipo che distorcono i segnali e quindi compromettono la qualità dell’immagine, tra i quali:
Corrente oscura: il motivo principale di questo fenomeno è l’emissione termoionica di elettroni, ossia l’emissione spontanea di elettroni che causa il riscaldamento del materiale che costituisce il sensore. Più è bassa la temperatura, minore è il segnale di corrente oscura e quindi inferiore il disturbo generato; proprio per questa finalità vengono utilizzati l’otturatore e la calibrazione del microbolometro.
Lettura: quando il segnale presente in un pixel viene estratto dal sensore, trasformato in voltaggio e amplificato, ogni suo elemento acquisisce un ulteriore disturbo che viene chiamato disturbo di lettura.
Per ridurre queste problematiche viene fatto ricorso a diversi algoritmi software, spesso definiti algoritmi per la rimozione dei disturbi.
Ma oltre ai vari disturbi, anche le interferenze elettroniche derivanti da configurazioni errate dei componenti (posizione delle schede elettroniche, cablaggio interno) o da un errore nella disposizione delle schede (posizione delle vie di conduzione, qualità degli strati protettivi) possono abbassare notevolmente la risoluzione. Le interferenze elettroniche possono anche essere dovute a errori nei circuiti elettronici, come una scelta sbagliata degli elementi per la creazione di filtri all’interno dei circuiti di alimentazione. Per questi motivi la configurazione e disposizione dei circuiti elettronici, la codifica di software di elaborazione del segnale e la tracciatura delle schede sono aspetti fondamentali quando si tratta di progettare strumenti per la visione termica.
Relazione tra risoluzione e altri fattori:
Maggiore è la quantità di pixel e minore la loro dimensione nel sensore termico, maggiore è la risoluzione.
Questa affermazione è corretta a parità di dimensione fisica del sensore. Sensori con una densità di pixel superiore hanno una migliore risoluzione.
Distanza di osservazione
La distanza di osservazione dichiarata per un dispositivo termico dipende da numerosi fattori interni (parametri del sensore, ottiche, elettronica) e condizioni esterne (caratteristiche dell’oggetto osservato, sfondo, luminosità dell’atmosfera, ecc.)
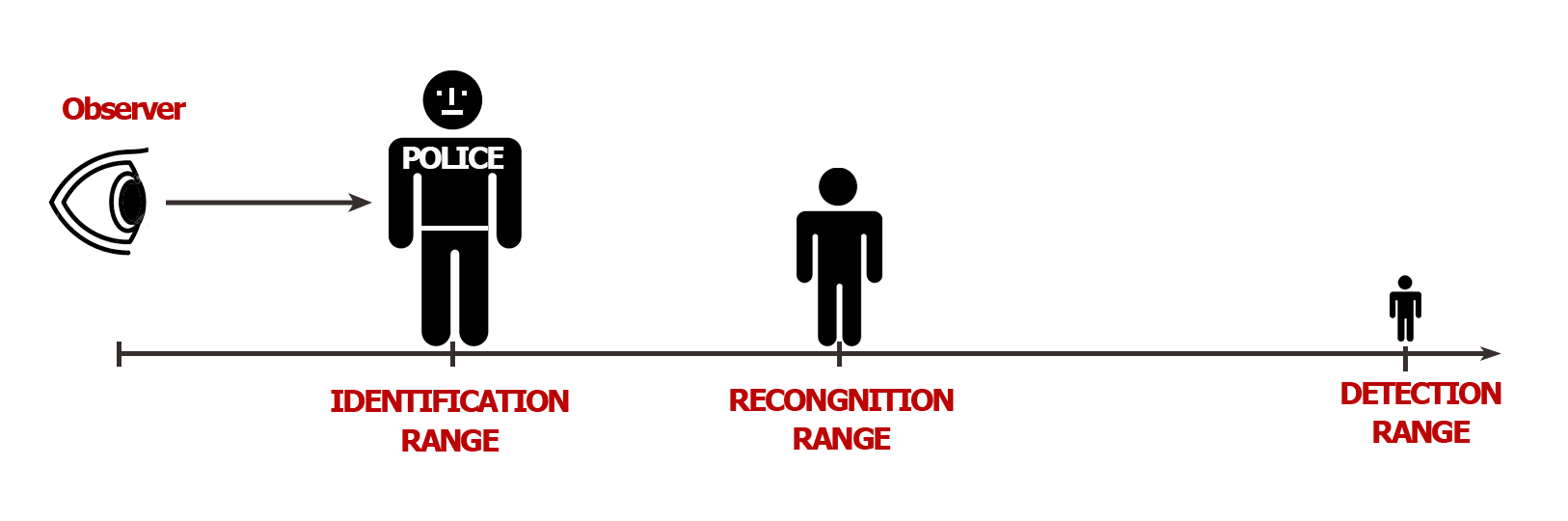
La distanza di osservazione è solitamente suddivisa in distanza di rilevamento, distanza di riconoscimento e distanza di identificazione. Ognuna di queste distanze è definita secondo i criteri di Johnson, per i quali la distanza di osservazione è direttamente legata alla temperatura e alla risoluzione spaziale.
Per comprendere pienamente questo argomento è necessario introdurre il concetto della dimensione critica di un oggetto osservato. La dimensione critica è quella dimensione che serve come base per l’analisi dell’immagine dell’oggetto al fine di scoprire le sue tipiche caratteristiche geometriche. Ad esempio, la dimensione critica di un cinghiale, di un capriolo e di un essere umano è l’altezza del suo corpo.
Distanza di rilevamento
La distanza alla quale la dimensione critica di un oggetto osservato impegna due o più pixel di un sensore termico è chiamata distanza di rilevamento. Rilevamento significa che un oggetto è visibile a una certa distanza, senza però che vi siano informazioni riguardo alle sue caratteristiche. In altre parole, il tipo di oggetto non può essere determinato.
Distanza di riconoscimento
Il riconoscimento di un oggetto significa che può essere definita la tipologia dell’oggetto stesso, quindi l’osservatore può discernere cosa stia osservando: un uomo, un animale, una macchina, ecc. Si ritiene che il riconoscimento sia possibile quando la dimensione critica di un oggetto occupa almeno 6 pixel del sensore.
Distanza di identificazione
Dal punto di vista di un cacciatore, la distanza più importante è quella di identificazione. Con questo termine si vuole indicare che l’osservatore non solo è in grado di determinare il tipo di oggetto, ma anche i suoi tratti caratteristici (ad esempio, un cinghiale maschio lungo 1,2 m e alto 0,7 m). Affinché questo avvenga, la dimensione critica di un oggetto dovrebbe occupare almeno 12 pixel del sensore.
È importante comprendere che in tutti i casi citati c’è una probabilità del 50% di rilevamento, riconoscimento o identificazione di un oggetto specifico. Maggiore è il numero di pixel coperti dalla dimensione critica di un oggetto, più alta è la probabilità di rilevamento, riconoscimento o identificazione.
Estrazione pupillare
L’estrazione pupillare è la distanza tra la superficie esterna dell’ultima lente dell’oculare e il piano in cui si trova l’occhio dell’osservatore quando l’immagine osservata è ottimale, con il più ampio campo visivo possibile e distorsioni minime. Questo parametro è molto importante per i cannocchiali da puntamento, dove l’estrazione pupillare dovrebbe essere di almeno 50 mm (idealmente 80-100 mm). Questi valori elevati sono necessari per prevenire possibili infortuni dovuti al rinculo causato dallo sparo. La regola generale è che nei dispositivi termici e per la visione notturna l’estrazione pupillare equivalga alla lunghezza del paraocchi necessario per nascondere la luce emessa dal display.
Calibrazione del sensore termico
La calibrazione di uno strumento termico può essere suddivisa in calibrazione in fabbrica e calibrazione eseguita dall’utente. Il processo di produzione di uno strumento termico con l’utilizzo di microbolometri non raffreddati (sensori termici) richiede una calibrazione in fabbrica (accoppiamento della lente dell’obiettivo con il sensore) tramite attrezzature apposite.
La calibrazione in fabbrica non elimina la necessità di una calibrazione personale dell’utente durante l’osservazione. Durante il funzionamento del dispositivo, una calibrazione da parte dell’utente può essere effettuata con l’aiuto di un otturatore interno che copre il sensore o di un coperchio lente che copre la lente dell’obiettivo e il sensore. Vale la pena sottolineare che la calibrazione utilizzando il coperchio lente fornisce il miglior risultato, in quanto corregge anche i difetti dell’immagine causati da emissioni indesiderate provenienti dai componenti e dalle lenti del dispositivo. Alcuni strumenti vengono calibrati tramite software, senza ricorrere a un otturatore o a un coperchio lente.
La calibrazione da parte dall’utente è necessaria a causa del riscaldamento non uniforme del sensore termico durante il suo utilizzo, che genera dei disturbi che determinano una riproduzione non corretta della scena osservata. Durante il processo di calibrazione diverse parti del sensore vengono analizzate e vengono effettuati dei calcoli per livellare il segnale, così da ottenere un’immagine corretta.

 Thermion 2 LRF XL50
Thermal Imaging Mirini
Thermion 2 LRF XL50
Thermal Imaging Mirini
 Thermion 2 LRF
Thermal Imaging Mirini
Thermion 2 LRF
Thermal Imaging Mirini
 Talion
Thermal Imaging Mirini
Talion
Thermal Imaging Mirini
 Thermion 2
Thermal Imaging Mirini
Thermion 2
Thermal Imaging Mirini
 Merger LRF XL50
Binocolo termico
Merger LRF XL50
Binocolo termico
 Merger LRF XP50
Binocolo termico
Nuovo
Merger LRF XP50
Binocolo termico
Nuovo Merger LRF XP35
Binocolo termico
Merger LRF XP35
Binocolo termico
 Merger LRF XQ35
Binocolo termico
Nuovo
Merger LRF XQ35
Binocolo termico
Nuovo Telos
Ambiti di imaging termico
Telos
Ambiti di imaging termico
 Axion 2 LRF
Ambiti di imaging termico
Axion 2 LRF
Ambiti di imaging termico
 Axion 2
Ambiti di imaging termico
Nuovo
Axion 2
Ambiti di imaging termico
Nuovo Axion XQ30 PRO
Ambiti di imaging termico
Axion XQ30 PRO
Ambiti di imaging termico
 Krypton 2
Ambiti di imaging termico
Krypton 2
Ambiti di imaging termico
 Axion XM30F
Ambiti di imaging termico
Axion XM30F
Ambiti di imaging termico
 Pulsar Digex-XS
Illuminatori a infrarossi esterni
Pulsar Digex-XS
Illuminatori a infrarossi esterni
 Pacchi Batteria APS
Pacchi Batteria
Pacchi Batteria APS
Pacchi Batteria
 Caricatore di Batterie APS
Caricatore di Batterie
Caricatore di Batterie APS
Caricatore di Batterie
 Pacchi Batteria IPS
Pacchi Batteria
Pacchi Batteria IPS
Pacchi Batteria
 Caricatore di Batterie IPS
Caricatore di Batterie
Caricatore di Batterie IPS
Caricatore di Batterie
 Supporto per Fucile
per Cannocchiali Pulsar
Supporto per Fucile
per Cannocchiali Pulsar
 Distanziatori H7
Kit di riparazione
Nuovo
Distanziatori H7
Kit di riparazione
Nuovo PSP-V Weaver Rail Adapter
Adapter
PSP-V Weaver Rail Adapter
Adapter
 PSP Ring Adapters
Adapters
Nuovo
PSP Ring Adapters
Adapters
Nuovo Adattatori ad anello PSP-B
Adattatori ad anello
Adattatori ad anello PSP-B
Adattatori ad anello
 Adattatori ad Anello della Copertura FN
Adattatori ad Anello della Copertura
Adattatori ad Anello della Copertura FN
Adattatori ad Anello della Copertura
 Telecomandi Wireless
per dispositivi digitali e visori termici
Telecomandi Wireless
per dispositivi digitali e visori termici
 Supporto per morsetto
Accessories Pulsar
Supporto per morsetto
Accessories Pulsar
 SUPPORTO PER ALBERI
Accessories Pulsar
SUPPORTO PER ALBERI
Accessories Pulsar
 SUPPORTO PER STRUTTURA FINESTRA
Accessories Pulsar
SUPPORTO PER STRUTTURA FINESTRA
Accessories Pulsar
 Supporto Telefono HELION FLIP-UP
Accessories Pulsar
Supporto Telefono HELION FLIP-UP
Accessories Pulsar
 Supporto per vetro liscio
Accessories Pulsar
Supporto per vetro liscio
Accessories Pulsar
 Cinturino
Accessories Pulsar
Nuovo
Cinturino
Accessories Pulsar
Nuovo Monocolo Pulsar 3x20 B
Accessori
Monocolo Pulsar 3x20 B
Accessori
 Bersagli per L’azzeramento di Dispositivi Termici
Accessories
Bersagli per L’azzeramento di Dispositivi Termici
Accessories
 Telos LRF Tripod Adapter
Accessories Pulsar
Telos LRF Tripod Adapter
Accessories Pulsar















 English
English German
German French
French Spanish
Spanish Italiano
Italiano English
English Lietuvių
Lietuvių